easy_handeye眼在手上仿真标定时,获取的相机到aruco码的位姿不对
-
版本ros-noetic
这是-
列表配置的easy_handeye```
<launch>
<arg name="namespace_prefix" default="easy_handeye" /><arg name="marker_size" doc="Size of the ArUco marker used, in meters" value="0.2"/>
<arg name="marker_id" doc="The ID of the ArUco marker used" value="582"/><!-- <node name="reset_robot_pose" pkg="hand_eye_calibration" type="reset_robot_pose" /> -->
<!-- start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/camera/rgb/camera_info" />
<remap from="/image" to="/camera/rgb/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="camera_rgb_optical_frame"/>
<param name="camera_frame" value="camera_rgb_optical_frame"/>
<param name="marker_frame" value="camera_marker" />
</node><!-- start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch">
<!-- <arg name="rviz_config_file" value="$(find robot_sim)/hand_eye_calibration/rviz/rviz_easy_handeye.config" /> -->
<arg name="move_group" value="arm" />
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="true" /><arg name="tracking_base_frame" value="camera_rgb_optical_frame" /> <arg name="tracking_marker_frame" value="camera_marker" /> <arg name="robot_base_frame" value="Link_0" /> <arg name="robot_effector_frame" value="Link_6" /> <arg name="freehand_robot_movement" value="false" /> <arg name="robot_velocity_scaling" value="0.5" /> <arg name="robot_acceleration_scaling" value="0.2" /></include>
<include file="$(find easy_handeye)/launch/publish.launch">
<arg name="eye_on_hand" value="true" />
</include>
<node name="aruco" pkg="gazebo_ros" type="spawn_model" args="-file $(find hand_eye_calibration)/urdf/model.sdf -sdf -model aruco -x 0.4 -y 0.05 -z 0.0 " />
<!-- <node name="table" pkg="gazebo_ros" type="spawn_model" args="-file $(find hand_eye_calibration)/urdf/table_marble/model.sdf -sdf -model table -x 0.0 -y 1.2 -z 0.0" /> -->
</launch>
这是标定界面的图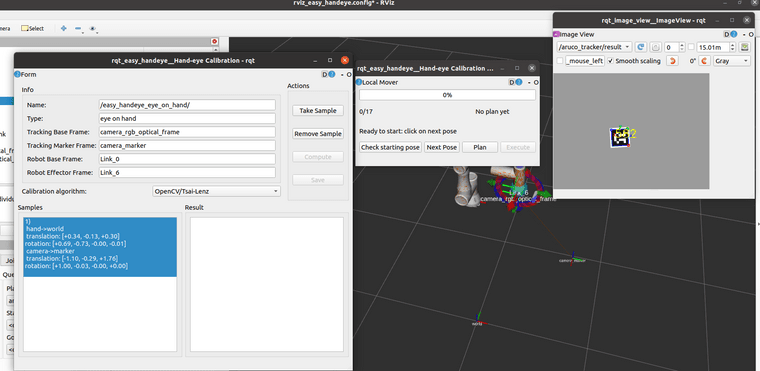 感觉这个camera_marker的坐标系位置是不是有问题呀 0.71793; 0.97516; -0.0036655这是当前camera_marker的坐标位置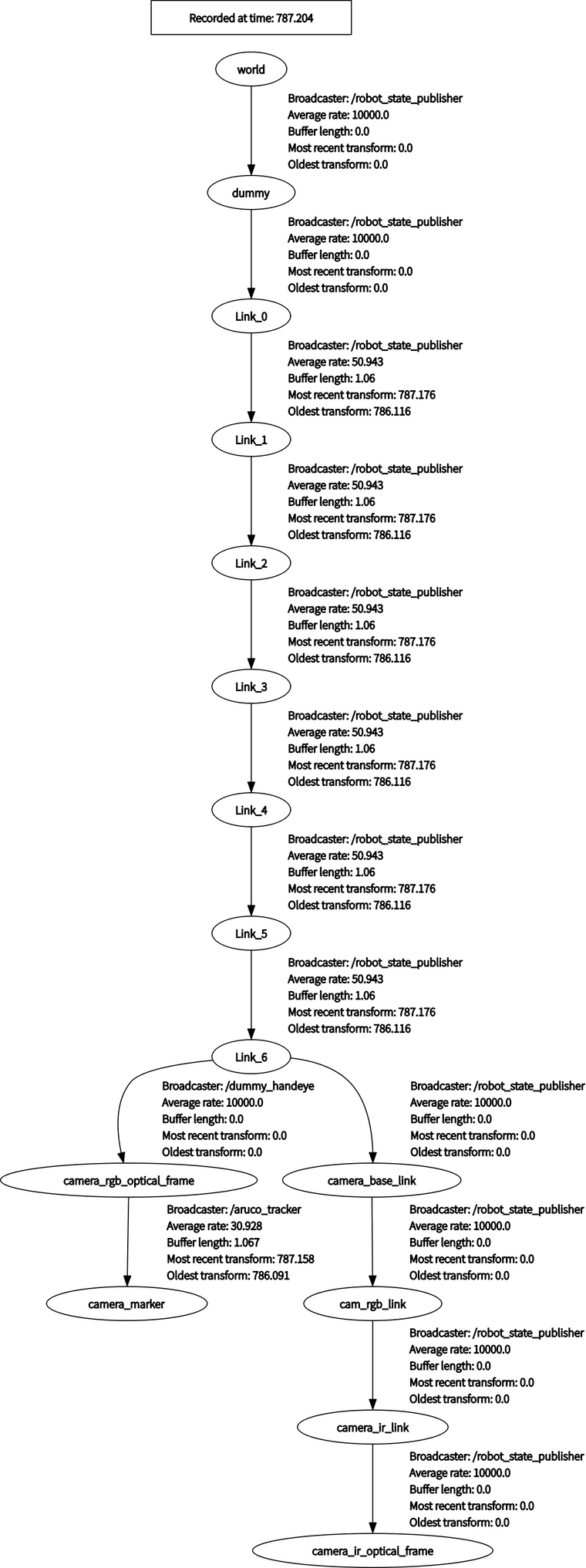 :blush: :blush: 当前机械臂link_0的位置x:0 y:0 z:1.5 试过好几次,标定的结果都差的很离谱 <joint name="camera_arm" type="fixed"> <origin rpy="0 -1.57 1.57" xyz="0 -0.1 0.05" /> <parent link="Link_6" /> <child link="camera_base_link" /> </joint> -