在fishbot实机上跑教程里的cartographer建图没有map数据
-
学习《动手学ROS2》第10章入门篇配置fishbot进行建图时,根据教程使用gazebo仿真建图是ok的,能跑起来。然后我尝试着用fishbot实机去建图,就跑不起来了。
我输入了一下命令行:启动microRos
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6启动雷达(按1)
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser这个是启动tf树?
ros2 launch fishbot_bringup fishbot_bringup.launch.py然后根据教程里配置好自己的cartographer配置文件,并运行后,rviz界面如下
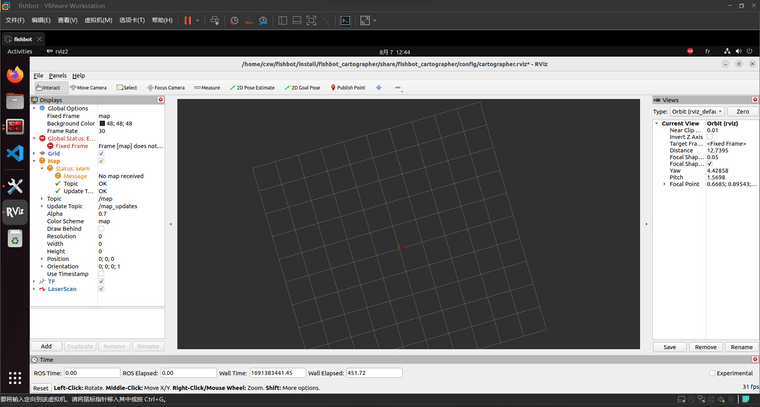
rqt_grapher如下
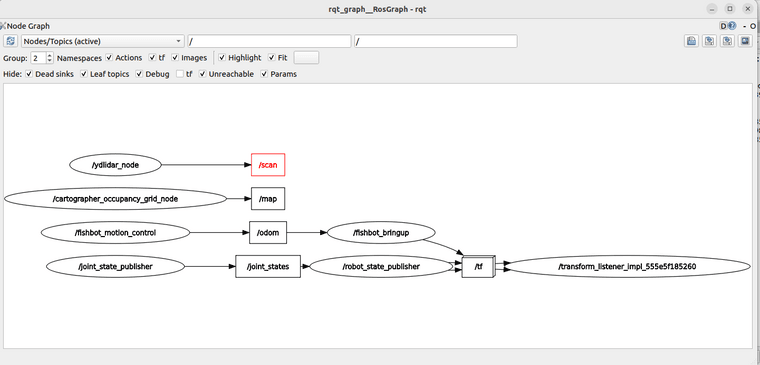
明显是有问题的,请问要怎么改呢?为什么gazebo的可以跑起来呢?
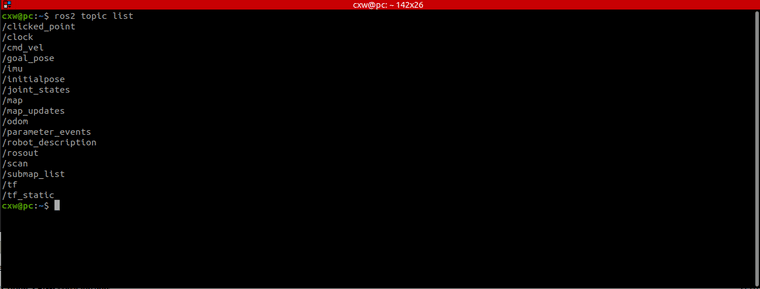
此时话题list如下图:
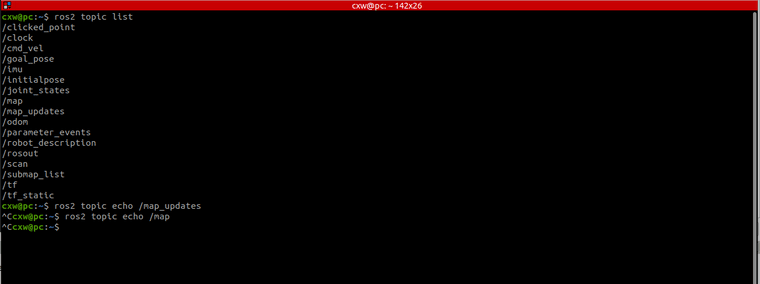
监听map和map_update也是没有数据:
求大佬指教
-
@siviechen 应该选2建图
-
@小鱼 鱼佬!
但是我想理解一下整个过程。选项2里的源码实在docker里的,要在哪里看呢 -
@siviechen 源码版本在这里看
@小鱼 在 FishBot配套资料教程汇总 中说:
拓展1:FishBot配套雷达驱动教程(源码版)
拓展2:树莓派上使用micros-agent驱动主控板的方法
拓展3:FishBot 树莓派配置建图导航