连接正常却无node无topic
-

我使用的RT-thread+STM32
32的程序是官方int32_publisher那套,上下位机的代码都找的是humble版本
上位机Agent代码来自以下语句git clone http://github.fishros.org/https://github.com/micro-ROS/micro-ROS-Agent.git -b humble git clone http://github.fishros.org/https://github.com/micro-ROS/micro_ros_msgs.git -b humble现在搞不懂哪边出问题了
下面是32中有关的代码#include <rtthread.h> #include <micro_ros_rtt.h> #include <stdio.h> #include <rcl/rcl.h> #include <rcl/error_handling.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <std_msgs/msg/int32.h> static rcl_publisher_t publisher; static std_msgs__msg__Int32 msg; static rclc_executor_t executor; static rclc_support_t support; static rcl_allocator_t allocator; static rcl_node_t node; static rcl_timer_t timer; static void timer_callback(rcl_timer_t * timer, int64_t last_call_time) { // RCLC_UNUSED(last_call_time); if (timer != NULL) { rcl_publish(&publisher, &msg, NULL); rt_kprintf("msg.data = %d\n", msg.data); msg.data++; } else { rt_kprintf("[micro_ros] timer null\n"); } } static void microros_pub_int32_thread_entry(void *parameter) { while(1) { rt_thread_mdelay(100); rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); } } void microros_pub_int32(int argc, char* argv[]) { #if defined MICRO_ROS_USE_SERIAL // Serial setup set_microros_transports(); #endif #if defined MICRO_ROS_USE_UDP // UDP setup if(argc==2) { set_microros_udp_transports(argv[1], 9999); } else { set_microros_udp_transports("192.168.1.100", 9999); } #endif allocator = rcl_get_default_allocator(); //create init_options if (rclc_support_init(&support, 0, NULL, &allocator) != RCL_RET_OK) { rt_kprintf("[micro_ros] failed to initialize\n"); return; }; // create node if (rclc_node_init_default(&node, "micro_ros_rtt_node", "", &support) != RCL_RET_OK) { rt_kprintf("[micro_ros] failed to create node\n"); return; } rt_kprintf("[micro_ros] node created\n"); // create publisher rclc_publisher_init_default( &publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), "micro_ros_rtt_node_publisher"); rt_kprintf("[micro_ros] publisher created\n"); // create timer const unsigned int timer_timeout = 1000; rclc_timer_init_default( &timer, &support, RCL_MS_TO_NS(timer_timeout), timer_callback); rt_kprintf("[micro_ros] timer created\n"); // create executor rclc_executor_init(&executor, &support.context, 1, &allocator); rclc_executor_add_timer(&executor, &timer); rt_kprintf("[micro_ros] executor created\n"); msg.data = 0; rt_thread_t thread = rt_thread_create("mr_pubint32", microros_pub_int32_thread_entry, RT_NULL, 2048, 25, 10); if(thread != RT_NULL) { rt_thread_startup(thread); rt_kprintf("[micro_ros] New thread mr_pubint32\n"); } else { rt_kprintf("[micro_ros] Failed to create thread mr_pubint32\n"); } } MSH_CMD_EXPORT(microros_pub_int32, microros publish int32 example) -
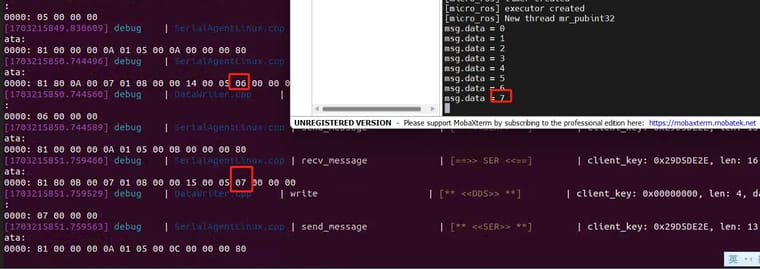
不太懂内部运行原理,摸索的时候 在v6中 发现数据确实过来了 -
遇到了一样的问题,debug有数据, 没有node和topic