动手学ros2中关于旋转惯量矩阵计算疑问
-
动手学ros2仿真章节中,base_link的属性如下
<collision> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <cylinder length="0.12" radius="0.10"/> </geometry> <material name="blue"> <color rgba="0.1 0.1 1.0 0.5" /> </material> </collision>也就是h=0.12,r=0.10,后面给的m=0.2
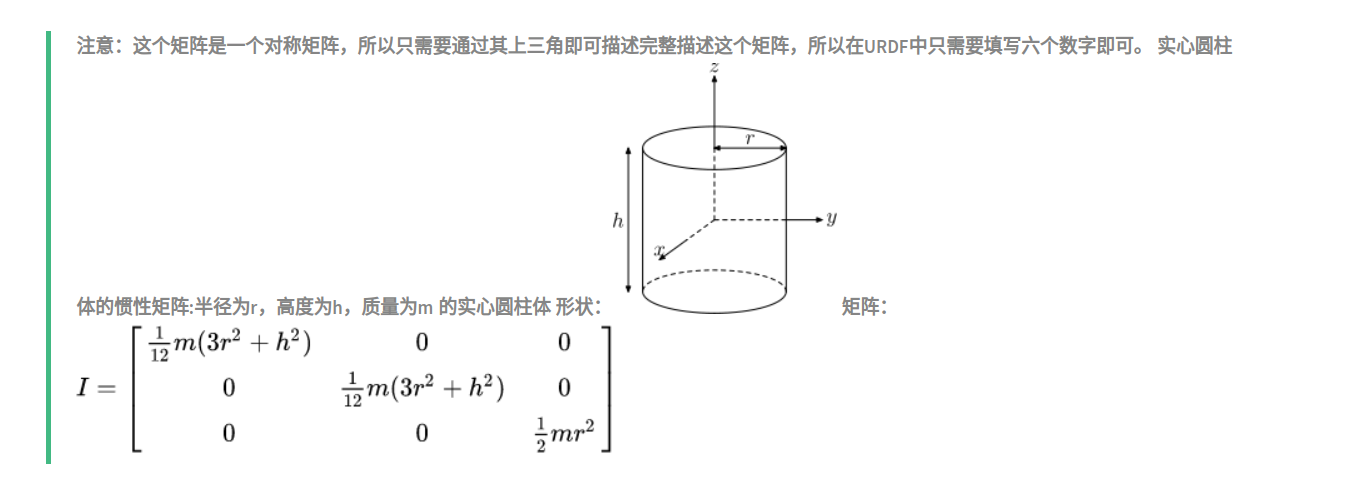
依据公式计算
ixx = iyy = (1/12) * (0.12^2 + 3 * 0.10^2)* 0.2 = 0.00074
izz = (1/2) * 0.2 * 0.10^2=0.001而最后给出的结果是
<inertial> <mass value="0.2"/> <inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/> </inertial>这是为什么呢?
-
@3253519642 当时随手给的,后面忘记改了,按照计算结果为准