Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
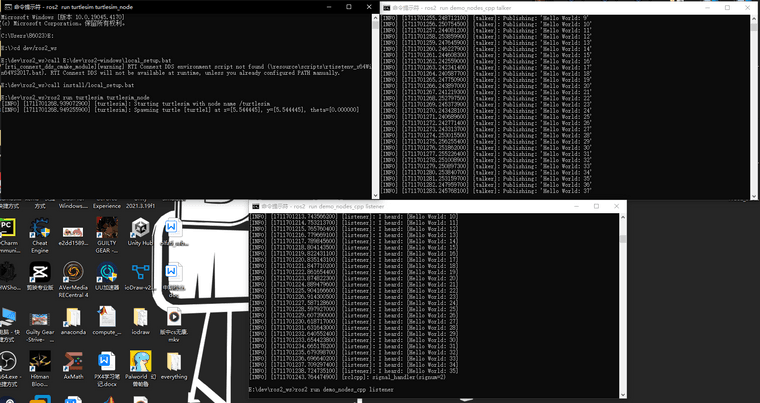
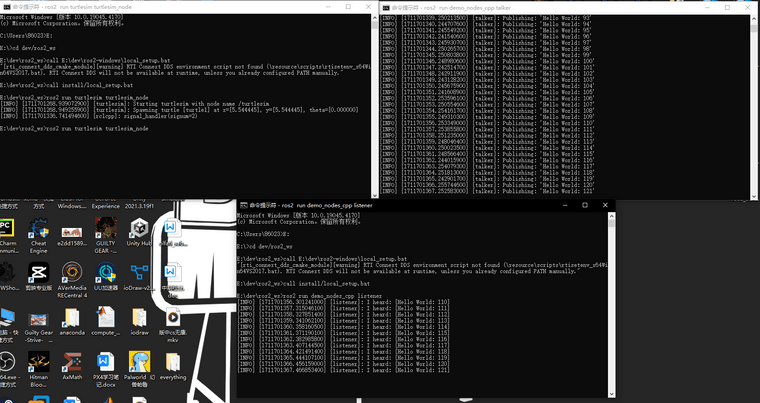
ros2只能同时启动两个节点,第三个节点运行时会卡住,并且无法使用ctrl+c强退。 如图,跑了talker和listener就无法启动turtle;跑了turtle和talker就无法启动listener