esp32是否支持std_msgs__msg__Float64MultiArray
-
在上位机(Ubuntu 22 + humble)发布了一个节点,发布消息,消息的内容是手柄上两个摇杆的值,组成的一个array:
[INFO] [1712502446.850122187] [joy_publisher_node]: Publishing Joy data to joyaxisTopic: array('d', [-0.0, -0.0])在下位机(fishbot四驱)上编程准备接受这两个数据,并通过这两个数值来控制电机
#include <Arduino.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <std_msgs/msg/float64.h> #include <Esp32McpwmMotor.h> #include <std_msgs/msg/float64_multi_array.h> Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机 rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; // 声明话题订阅者 rcl_subscription_t subscriber; // 声明消息文件 // std_msgs__msg__Float64 sub_msg; std_msgs__msg__Float64MultiArray sub_msg; void callback_subscription_(const void *msgin) { const std_msgs__msg__Float64MultiArray *msg = (const std_msgs__msg__Float64MultiArray *)msgin; if (msg->data.size >= 2) { motor.updateMotorSpeed(0, int16_t(msg->data.data[0]*100)); // 设置电机0的速度(占空比)为负70% motor.updateMotorSpeed(1, int16_t(msg->data.data[0]*100)); // 设置电机1的速度(占空比)为正70% } } int motorStatus = 0; // 电机状态变量,0-3循环变化 void setup() { Serial.begin(115200); // 初始化串口通信 motor.attachMotor(0, 16, 17); // 将电机0连接到引脚23和引脚22 motor.attachMotor(1, 12, 22); // 将电机1连接到引脚12和引脚13 // 设置通过串口进行MicroROS通信 set_microros_serial_transports(Serial); // 延时时一段时间,等待设置完成 // delay(2000); // 初始化内存分配器 allocator = rcl_get_default_allocator(); // 创建初始化选项 rclc_support_init(&support, 0, NULL, &allocator); // 创建节点 topic_sub_test rclc_node_init_default(&node, "topic_sub_test", "", &support); // 订阅者初始化 rclc_subscription_init_default( &subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float64MultiArray), "joyaxisTopic_0"); // 创建执行器 rclc_executor_init(&executor, &support.context, 1, &allocator); // 为执行器添加一个订阅者 rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA); } void loop() { // delay(100); // 循环处理数据 rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); }编译上传,代码不报错,但是启动agent以后,手柄动,数值动,电机没有任何相应。
-
@harebert 要回答,我就尽量把这个东西给讲明白,在micro-ROS里,对于复杂的数据结构(包含指针的),需要提前进行内存的分配,这样当订阅到数据的时候才能把数据放入内存,然后进行回调。
接着我们来看你用到的这个std_msgs__msg__Float64MultiArray的定义。
路径: .pio/libdeps/featheresp32/micro_ros_platformio/libmicroros/include/std_msgs/msg/detail/float64_multi_array__struct.h
typedef struct std_msgs__msg__Float64MultiArray { /// Please look at the MultiArrayLayout message definition for /// documentation on all multiarrays. /// specification of data layout std_msgs__msg__MultiArrayLayout layout; /// array of data rosidl_runtime_c__double__Sequence data; } std_msgs__msg__Float64MultiArray;可以看到数据部分的定义是, rosidl_runtime_c__double__Sequence data;
再来看这个的定义。.pio/libdeps/featheresp32/micro_ros_platformio/libmicroros/include/rosidl_runtime_c/primitives_sequence.h
#define ROSIDL_RUNTIME_C__PRIMITIVE_SEQUENCE(STRUCT_NAME, TYPE_NAME) \ typedef struct rosidl_runtime_c__ ## STRUCT_NAME ## __Sequence \ { \ TYPE_NAME * data; /*!< The pointer to an array of STRUCT_NAME */ \ size_t size; /*!< The number of valid items in data */ \ size_t capacity; /*!< The number of allocated items in data */ \ } rosidl_runtime_c__ ## STRUCT_NAME ## __Sequence;这是一个用于定义的宏定义,其中data部分可以看到,是 TYPE_NAME 类型的指针,这里你可以把 TYPE_NAME 当成 double。
所以 std_msgs__msg__Float64MultiArray sub_msg; 中只是定义了一个数据的指针,数据指向的地址还是空的,所以你可以创建一个double类型的数组,然后将数组的地址传递给这个指针,当有数据的时候,就可以把数据放到这个数组中了。
double array[4]; std_msgs__msg__Float64MultiArray sub_msg; void callback_subscription_(const void *msgin) { const std_msgs__msg__Float64MultiArray *msg = (const std_msgs__msg__Float64MultiArray *)msgin; if (msg->data.size >= 2) { motor.updateMotorSpeed(0, int16_t(msg->data.data[0]*100)); // 设置电机0的速度(占空比)为负70% motor.updateMotorSpeed(1, int16_t(msg->data.data[0]*100)); // 设置电机1的速度(占空比)为正70% } } int motorStatus = 0; // 电机状态变量,0-3循环变化 void setup() { sub_msg.data.capacity = 4; // 告知容量,防止内存越界 sub_msg.data.data = array; // 赋值指针最后要确认话题名称和数据类型不要出错,另外可以在 callback_subscription_ 加一些打印,查看回调情况。祝一切顺利。
下次提问可以按照提问模板来:https://fishros.org.cn/forum/topic/151 ,如果能补充系统版本,ROS 版本和micro-ROS版本,可以排除掉更多的问题。
-
@小鱼
谢谢小鱼,的确帮助我这样的新手学习了不少知识。(我看了提问格式,以后尽量按照这样来发文)问题描述:
- 同本帖的问题,还未解决
- 我想问一下,在论坛里也没有搜索到的是当我使用agent通过Serial连接了上位机以后,还有什么方式可以在下位机上进行打印输出呢?串口监视器里似乎什么也看不到。
尝试过的解决方法:
我已经大致明白这个问题的原理。只是根据您的代码,仍然没有解决问题。
我在回调函数中设置了无论什么情况,是电机转动,但是我测试下来是回调函数没有起作用。
我也尝试用WiFi连接,连接是成功的,但是仍然无法启动回调函数。代码
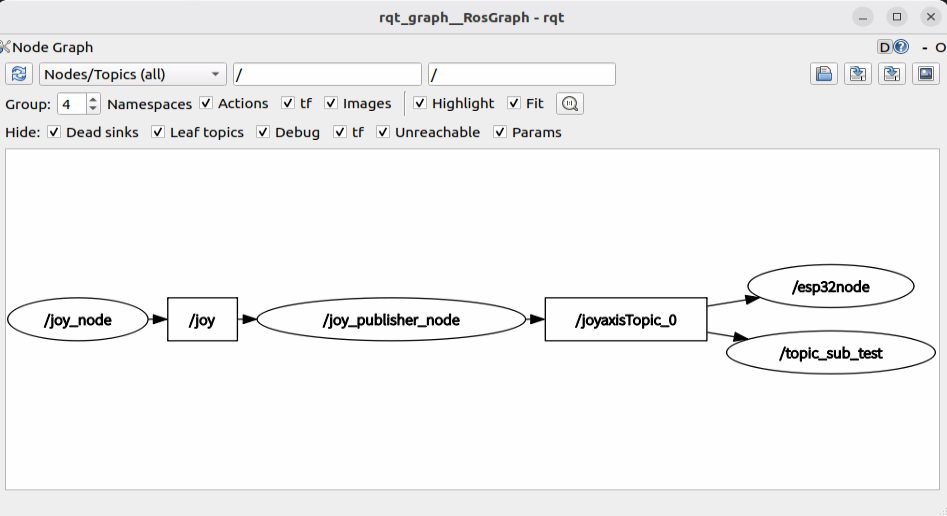
#include <Arduino.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <std_msgs/msg/float64.h> #include <Esp32McpwmMotor.h> #include <std_msgs/msg/float64_multi_array.h> #include <WiFi.h> Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机 rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; // 声明话题订阅者 rcl_subscription_t subscriber; // 声明消息文件 // std_msgs__msg__Float64 sub_msg; std_msgs__msg__Float64MultiArray sub_msg; double array[4]; void callback_subscription_(const void *msgin) { const std_msgs__msg__Float64MultiArray *msg = (const std_msgs__msg__Float64MultiArray *)msgin; motor.updateMotorSpeed(0, 100); //测试回调函数是否起效 if (msg->data.size >= 2) { motor.updateMotorSpeed(0, int16_t(msg->data.data[0]*100)); // 设置电机0的速度(占空比)为负70% motor.updateMotorSpeed(1, int16_t(msg->data.data[0]*100)); // 设置电机1的速度(占空比)为正70% } } void setup() { Serial.begin(115200); // 初始化串口通信 Serial1.begin(9600); motor.attachMotor(0, 16, 17); // 将电机0连接到引脚23和引脚22 motor.attachMotor(1, 12, 22); // 将电机1连接到引脚12和引脚13 motor.attachMotor(2, 25, 33); // 将电机1连接到引脚12和引脚13 sub_msg.data.capacity=4; sub_msg.data.data=array; // 设置通过串口进行MicroROS通信 set_microros_serial_transports(Serial); // 延时时一段时间,等待设置完成 delay(2000); // 初始化内存分配器 allocator = rcl_get_default_allocator(); // 创建初始化选项 rclc_support_init(&support, 0, NULL, &allocator); // 创建节点 topic_sub_test rclc_node_init_default(&node, "esp32node", "", &support); // 订阅者初始化 rclc_subscription_init_default( &subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float64MultiArray), "joyaxisTopic_0"); // 创建执行器 rclc_executor_init(&executor, &support.context, 1, &allocator); // 为执行器添加一个订阅者 rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA); } void loop() { rclc_executor_spin_some(&executor, RCL_MS_TO_NS(1000)); }附上rqt的图
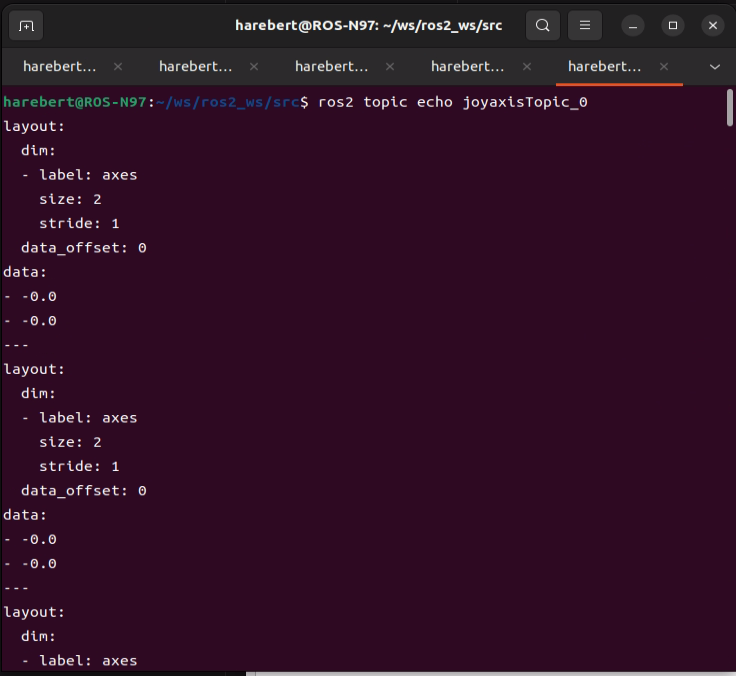
附 joyaxisTopic_0的echo
-
@harebert 抱歉,上一次的代码并没有初始化彻底,因为该消息接口: std_msgs__msg__Float64MultiArray 包含layout和data两部分,上一次提供的代码里只初始化了data,并未考虑对layout进行初始化。
查看layout部分消息接口可知:
// Struct for a sequence of std_msgs__msg__MultiArrayDimension. typedef struct std_msgs__msg__MultiArrayDimension__Sequence { std_msgs__msg__MultiArrayDimension * data; /// The number of valid items in data size_t size; /// The number of allocated items in data size_t capacity; } std_msgs__msg__MultiArrayDimension__Sequence;其也包含了指针类型接口体成员,所以需要使用类似的方法进行初始化发方便起见,使用malloc进行初始化。
// data 部分内存初始化 sub_msg.data.capacity = 4; sub_msg.data.data = array; sub_msg.data.size = 0; // layout 部分内存初始化 sub_msg.layout.dim.capacity = 4; sub_msg.layout.dim.size = 0; sub_msg.layout.dim.data = (std_msgs__msg__MultiArrayDimension *)malloc(sub_msg.layout.dim.capacity * sizeof(std_msgs__msg__MultiArrayDimension)); for (size_t i = 0; i < sub_msg.layout.dim.capacity; i++) { sub_msg.layout.dim.data[i].label.capacity = 4; sub_msg.layout.dim.data[i].label.size = 0; sub_msg.layout.dim.data[i].label.data = (char *)malloc(sub_msg.layout.dim.data[i].label.capacity * sizeof(char)); }对于回调打印或者使用第二个串口的方法,这里有三个方案:
- 使用串口+无线蓝牙(ESP32支持蓝牙,可以通过蓝牙进行数据输出,手机APP配合查看日志)
2.使用串口+WIFI(通过WIFI连接-miros-ROS,串口用于日志查看)
3.使用额外的串口(需要初始化为其他引脚,还需要一个USB转TTL工具连接,最后的代码提供了初始化方法)
上述三个方法,推荐程度:2>1>3,1和2可以在FishBot配套程序中找到使用方法。
最后附上代码和测试结果(调试通过的):
#include <Arduino.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <std_msgs/msg/float64.h> #include <std_msgs/msg/float64_multi_array.h> #include <WiFi.h> rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; // 声明话题订阅者 rcl_subscription_t subscriber; // 声明消息文件 // std_msgs__msg__Float64 sub_msg; std_msgs__msg__Float64MultiArray sub_msg; double array[4]; void callback_subscription_(const void *msgin) { const std_msgs__msg__Float64MultiArray *msg = (const std_msgs__msg__Float64MultiArray *)msgin; Serial1.printf("size=%d,data:[%f,%f]\n", sub_msg.data.size, sub_msg.data.data[0], sub_msg.data.data[1]); digitalWrite(2, !digitalRead(2)); // 闪烁 } void setup() { Serial.begin(115200); // 初始化串口通信 Serial1.begin(115200, SERIAL_8N1, 17, 16); // 加个串口 pinMode(2, OUTPUT); // 设置2号引脚模式为OUTPUT模式 // data 部分内存初始化 sub_msg.data.capacity = 4; sub_msg.data.data = array; sub_msg.data.size = 0; // layout 部分内存初始化 sub_msg.layout.dim.capacity = 4; sub_msg.layout.dim.size = 0; sub_msg.layout.dim.data = (std_msgs__msg__MultiArrayDimension *)malloc(sub_msg.layout.dim.capacity * sizeof(std_msgs__msg__MultiArrayDimension)); for (size_t i = 0; i < sub_msg.layout.dim.capacity; i++) { sub_msg.layout.dim.data[i].label.capacity = 4; sub_msg.layout.dim.data[i].label.size = 0; sub_msg.layout.dim.data[i].label.data = (char *)malloc(sub_msg.layout.dim.data[i].label.capacity * sizeof(char)); } // 设置通过串口进行MicroROS通信 set_microros_serial_transports(Serial); // 延时时一段时间,等待设置完成 delay(2000); // 初始化内存分配器 allocator = rcl_get_default_allocator(); // 创建初始化选项 rclc_support_init(&support, 0, NULL, &allocator); // 创建节点 topic_sub_test rclc_node_init_default(&node, "esp32node", "", &support); // 订阅者初始化 rclc_subscription_init_default( &subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float64MultiArray), "joyaxisTopic_0"); // 创建执行器 rclc_executor_init(&executor, &support.context, 1, &allocator); // 为执行器添加一个订阅者 rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA); } void loop() { rclc_executor_spin_some(&executor, RCL_MS_TO_NS(1000)); }发布指令
ros2 topic pub /joyaxisTopic_0 std_msgs/msg/Float64MultiArray "{layout: {dim: [{label: '', size: 0, stride: 0}], data_offset: 0}, data: [1.0, 2.0]}"Serial1打印:
size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000] size=2,data:[1.000000,2.000000]对了,如果非必要不要截图,终端打印等最好使用文本进行复制粘贴。
- 使用串口+无线蓝牙(ESP32支持蓝牙,可以通过蓝牙进行数据输出,手机APP配合查看日志)
-
@小鱼
谢谢。问题最终解决。
现在已经能传输4个摇杆参数,并且控制小车的各种动作了。响应函数的代码如下,给以后遇到这个问题的朋友做个参考:
void callback_subscription_(const void *msgin) { const std_msgs__msg__Float64MultiArray *msg = (const std_msgs__msg__Float64MultiArray *)msgin; // motor.updateMotorSpeed(0, 100); if (msg->data.size >= 4) { //data[0] 为左摇杆的左右方向 //data[1] 为左摇杆的上下方向 //data[2] 为右摇杆的左右方向 //data[3] 为右摇杆的上下方向 // 获取摇杆的输入 double leftHorizontal = -msg->data.data[0]; // 左摇杆左右 double leftVertical = msg->data.data[1]; // 左摇杆上下 double rightHorizontal = -msg->data.data[2]; // 右摇杆左右 /// 计算每个电机的速度 double motorSpeed0 = (leftVertical - leftHorizontal + rightHorizontal) * 100; double motorSpeed1 = (leftVertical + leftHorizontal - rightHorizontal) * 100; double motorSpeed2 = (leftVertical - leftHorizontal - rightHorizontal) * 100; double motorSpeed3 = (leftVertical + leftHorizontal + rightHorizontal) * 100; // 更新电机速度,确保速度值在-100到100之间 motor.updateMotorSpeed(0, static_cast<int16_t>(std::max(std::min(motorSpeed0, 100.0), -100.0))); motor.updateMotorSpeed(1, static_cast<int16_t>(std::max(std::min(motorSpeed1, 100.0), -100.0))); motor.updateMotorSpeed(2, static_cast<int16_t>(std::max(std::min(motorSpeed2, 100.0), -100.0))); motor.updateMotorSpeed(3, static_cast<int16_t>(std::max(std::min(motorSpeed3, 100.0), -100.0))); } }问题描述:
1.前进、转向、平移都没有问题,现在的问题是前进叠加转向、或者平移的时候,电机转动一会就不动了。
2.关于Serial输出的问题,当我在platformio.ini加载了board_microros_transport = wifi以后,在main.cpp中的set_microros_serial_transports(Serial);就会报【未定义标识符 "set_microros_serial_transports"】尝试:
问题1,我估计是不是电机过载?
问题2,我想是不是响应的在platformio.ini中要写入关于Serial的相关库语句呢? -
@harebert 容许我小小的吐槽一下,尝试不是我估计和我想,而是我根据估计去做了什么测试,结果是什么。比如你觉得是电机过载,可以尝试降低速度再测试。
现在正式回答一下:
- 先排除通信问题,另外问题描述中,没有讲到如何供电,电池电量等信息,所以需要你进一步排查。
2.既然你设置了使用wifi传输,在代码里设置通过serial传输,这是很明显的冲突,请根据动手学ROS2或者小车配套教程中的使用方法,设置通过WIFI传输。
- 先排除通信问题,另外问题描述中,没有讲到如何供电,电池电量等信息,所以需要你进一步排查。
-
Serial的问题解决了。谢谢。的确我是没有搞清楚传输的代码。
我使用的是外接电源供电同时打开了电池的开关。通过串口的输出,在停转的时候,我获得了以下信息。
代码:
double leftHorizontal = msg->data.data[0]; // 左摇杆左右 double leftVertical = msg->data.data[1]; // 左摇杆上下 double rightHorizontal = -msg->data.data[2]; // 右摇杆左右 /// 计算每个电机的速度 double motorSpeed0 = (leftVertical - leftHorizontal + rightHorizontal) * 100; double motorSpeed1 = (leftVertical + leftHorizontal - rightHorizontal) * 100; double motorSpeed2 = (leftVertical - leftHorizontal - rightHorizontal) * 100; double motorSpeed3 = (leftVertical + leftHorizontal + rightHorizontal) * 100; // 更新电机速度,确保速度值在-100到100之间 motor.updateMotorSpeed(0, static_cast<int16_t>(std::max(std::min(motorSpeed0, 100.0), -100.0))); motor.updateMotorSpeed(1, static_cast<int16_t>(std::max(std::min(motorSpeed1, 100.0), -100.0))); motor.updateMotorSpeed(2, static_cast<int16_t>(std::max(std::min(motorSpeed2, 100.0), -100.0))); motor.updateMotorSpeed(3, static_cast<int16_t>(std::max(std::min(motorSpeed3, 100.0), -100.0))); Serial.println(motorSpeed0); Serial.println(static_cast<int16_t>(std::max(std::min(motorSpeed0, 100.0), -100.0)));错误信息:
ets Jul 29 2019 12:21:46
rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drets Jul 29 2019 12:21:46rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, ets Jul 29 2019 12:21:46rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0030,len:1184
load:0x40078000,len:13260
load:0x40080400,len:3028
entry 0x400805e4 -
@harebert 这个问题已经不属于消息接口问题,请单独附上完整代码和上下文,单独发帖。