ros2多机器gazebo仿真时的键盘工具控制问题
-
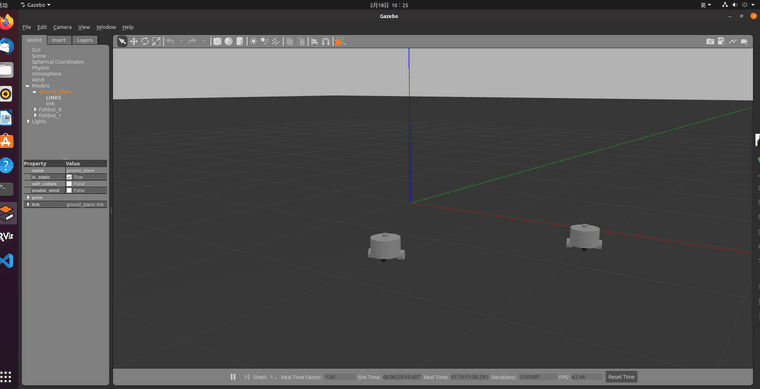
在有多个机器人的情况下,ros2在gazebo仿真时如何利用键盘工具控制单个机器人移动?
-
@1451024143 给不同的命名空间即可
-
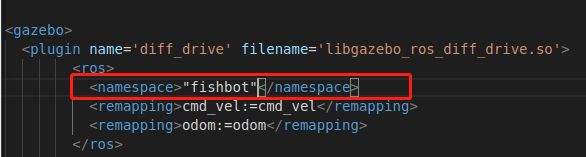
@小鱼 嗯...可以。我用rqt手动加载模型时可以设置namespace。但是在urdf的<gazebo><plugin>标签下的<ros>里面怎么设置呢?我尝试直接输入fishbot是无效的。我暂时没查找到相关资料。