moveit_setup_assistant 直线电机控制机械爪两指联动 添加组问题
-
请教一下大佬,如下图所示,自己手上的机械爪是一个直线电机(如图中红色部分示意)联动控制机械爪两指的开合。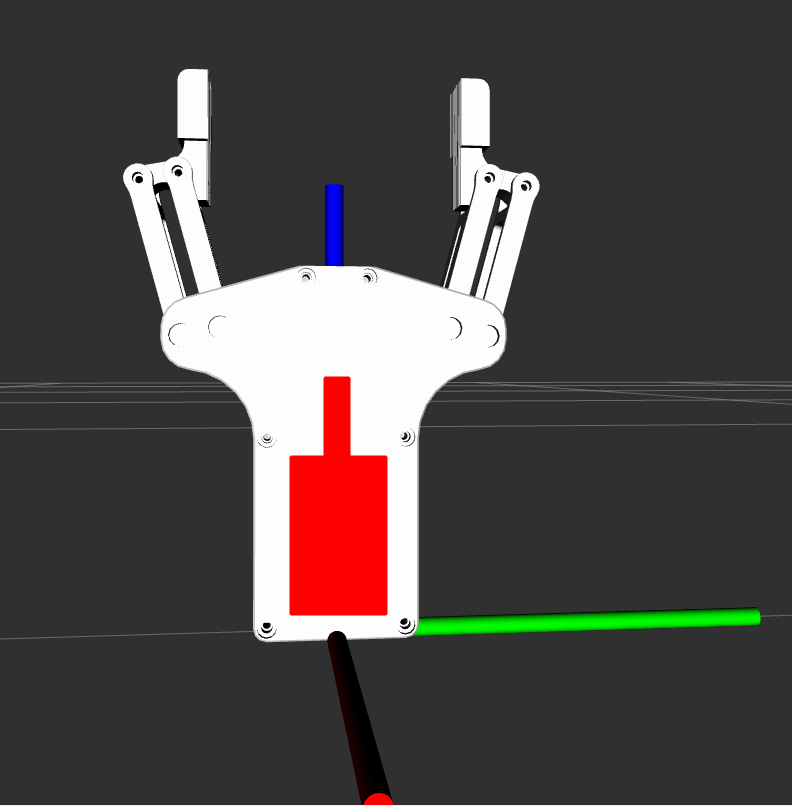
问题一:两指又是利用四连杆机构将来控制指端的姿态,如何配置四连杆关节的坐标系关系来表示这种闭环链呀?
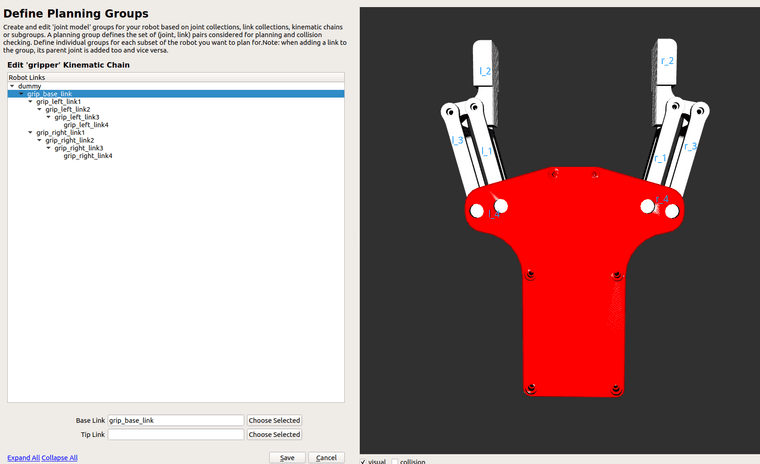
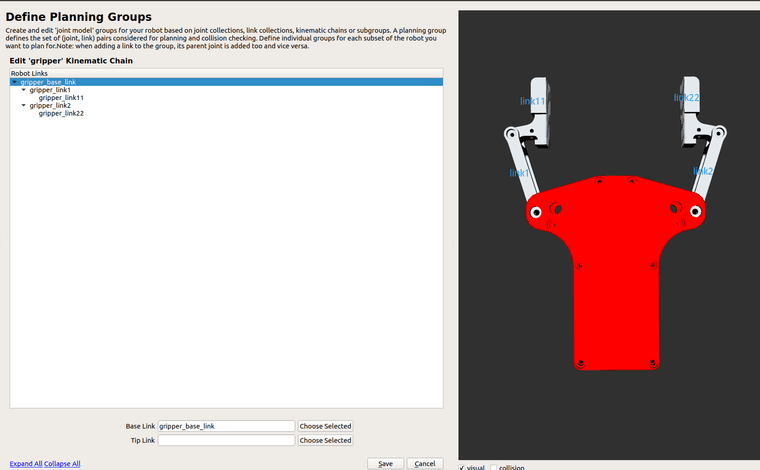
目前自己的处理方式是,去处四连杆机构,如下图所示,每指作为一个group,可以用moveit驱动单一指端(但和实际驱动有区别,实际两指是联动开合,引出了问题二)
问题二:如何配置 moveit_setup_assistant 使得机械爪两指联动与实际效果一致?
每指添加一个group的话,两指不能联动。 -
@Gene 没记错没办法实现闭链