humble版本执行 ros2 launch fishbot_cartographer cartographer.launch.py 时出错
-
source install/setup.bash
vico@wp:~/fishbot_ws/src$ ros2 launch fishbot_cartographer cartographer.launch.py
[INFO] [launch]: All log files can be found below /home/vico/.ros/log/2023-02-22-19-08-53-718889-wp-7239
[INFO] [launch]: Default logging verbosity is set to INFO
[ERROR] [launch]: Caught exception in launch (see debug for traceback): executable 'occupancy_grid_node' not found on the libexec directory '/home/vico/cartographer_ws/install/cartographer_ros/lib/cartographer_ros'
我的软件是22。04的ubuntu。装的是ros2 humble. 按照小鱼的文档操作后。在做上述launch时。提示找不到occupancy库,我按提示的路径去找,果然没有。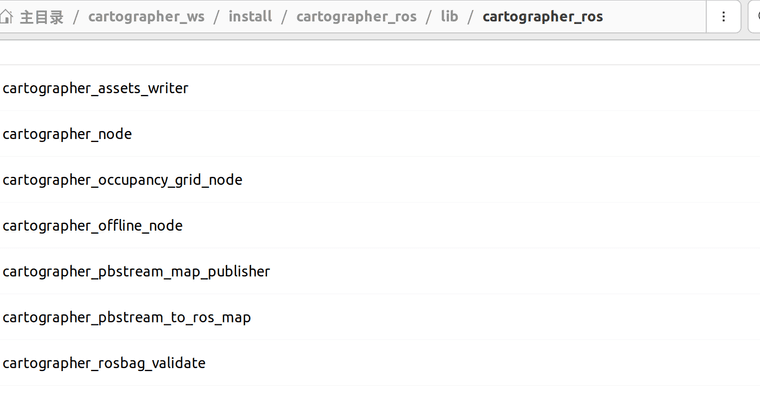 。我是源码安装的。怎么解决呢
。我是源码安装的。怎么解决呢 -
https://fishros.com/d2lros2foxy/#/chapt10/10.5配置Fishbot进行建图 用的文件就是10.5里面所用的例程
-
@vico1999 你的教程是foxy版本的哈,请切换humble版本的:https://fishros.com/d2lros2/#/humble/chapt10/get_started/3.配置FishBot进行建图