rosdepc init报错
-
-
ubuntu16.04 ros kinectic
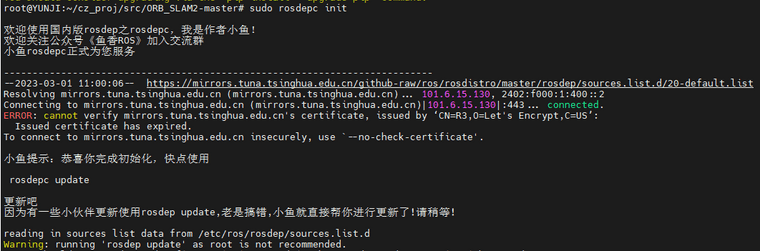
root@YUNJI:~/cz_proj/src/ORB_SLAM2-master# sudo rosdepc init欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
--2023-03-01 11:00:06-- https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Resolving mirrors.tuna.tsinghua.edu.cn (mirrors.tuna.tsinghua.edu.cn)... 101.6.15.130, 2402:f000:1:400::2
Connecting to mirrors.tuna.tsinghua.edu.cn (mirrors.tuna.tsinghua.edu.cn)|101.6.15.130|:443... connected.
ERROR: cannot verify mirrors.tuna.tsinghua.edu.cn's certificate, issued by ‘CN=R3,O=Let's Encrypt,C=US’:
Issued certificate has expired.
To connect to mirrors.tuna.tsinghua.edu.cn insecurely, use `--no-check-certificate'.小鱼提示:恭喜你完成初始化,快点使用
rosdepc update
更新吧
因为有一些小伙伴更新使用rosdep update,老是搞错,小鱼就直接帮你进行更新了!请稍等!reading in sources list data from /etc/ros/rosdep/sources.list.d
Warning: running 'rosdep update' as root is not recommended.
You should run 'sudo rosdep fix-permissions' and invoke 'rosdep update' again without sudo.
Query rosdistro index https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Add distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /root/.ros/rosdep/sources.cache小鱼恭喜:rosdepc已为您完成更新!!
如果在上述更新中遇到错误,请查看rosdepc常见错误解决方案:https://fishros.org.cn/forum/topic/676
如果在使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,最后加入QQ交流群 686914208(入群口令:一键安装)
root@YUNJI:~/cz_proj/src/ORB_SLAM2-master# ./build_ros.sh
Building ROS nodes
mkdir: cannot create directory ‘build’: File exists
[rosbuild] Building package ORB_SLAM2
Failed to invoke /opt/ros/kinetic/bin/rospack deps-manifests ORB_SLAM2
[rospack] Error: the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'CMake Error at /opt/ros/kinetic/share/ros/core/rosbuild/public.cmake:129 (message):
Failed to invoke rospack to get compile flags for package 'ORB_SLAM2'.
Look above for errors from rospack itself. Aborting. Please fix the
broken dependency!Call Stack (most recent call first):
/opt/ros/kinetic/share/ros/core/rosbuild/public.cmake:207 (rosbuild_invoke_rospack)
CMakeLists.txt:4 (rosbuild_init)-- Configuring incomplete, errors occurred!
See also "/root/cz_proj/src/ORB_SLAM2-master/Examples/ROS/ORB_SLAM2/build/CMakeFiles/CMakeOutput.log".
make: *** No targets specified and no makefile found. Stop. -
@1582573408 手动输入一次 rosdepc update