第八章中RVIZ无法正确显示两轮差速模型
-
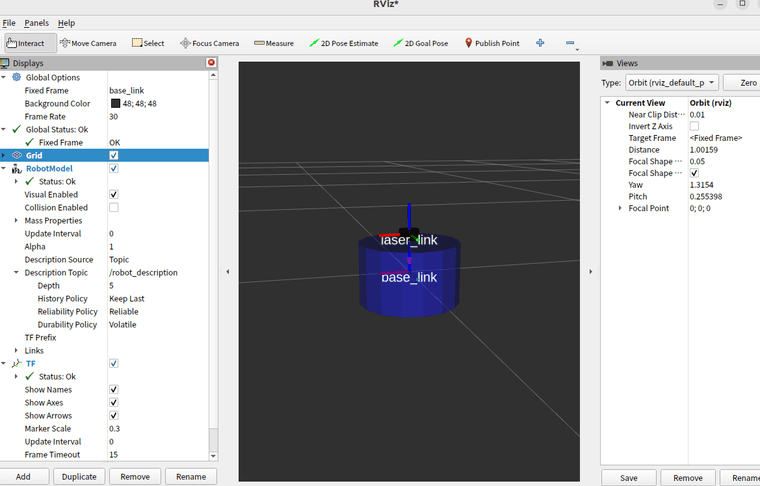
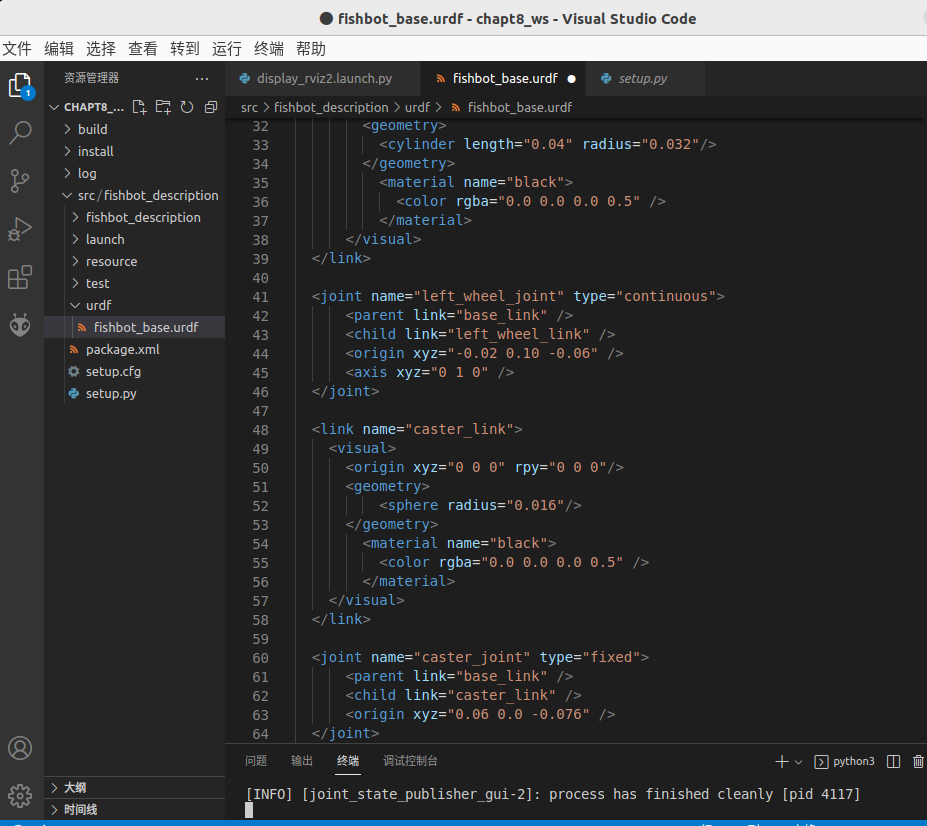
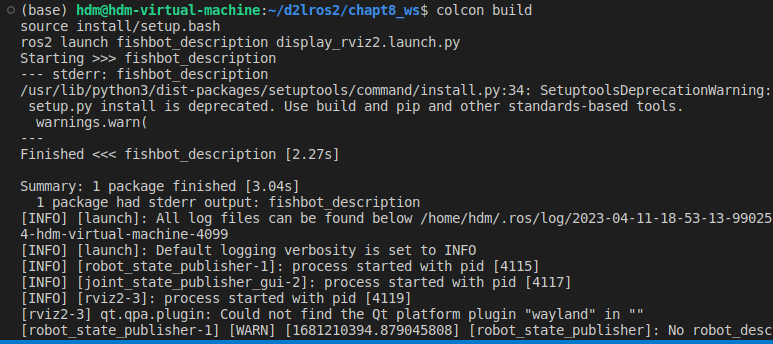
第八章入门篇3中RVIZ无法显示两轮差速模型(左轮右轮之类的显示不出来)。urdf中的代码都是直接复制文档的,不知道哪里出了问题。图一
图二
{kind=link}
{kind=link}