第八章创建的模型在rviz2可视化中报Warning
-
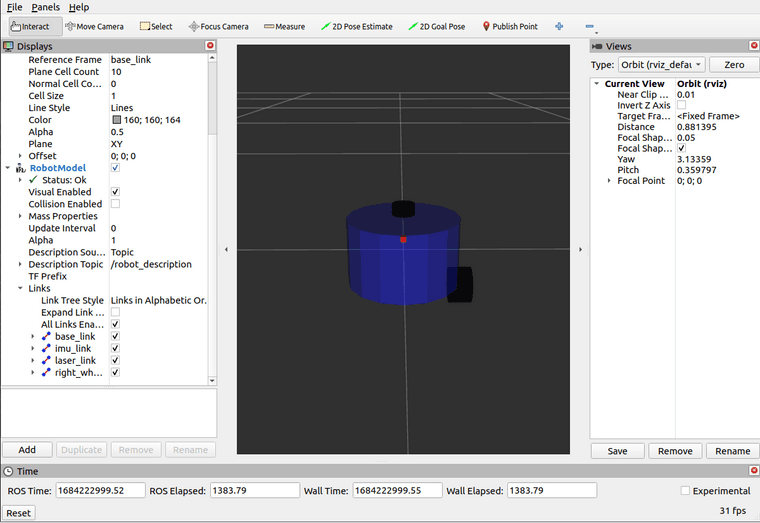
按照教程8.3 动手创建一个移动机器人添加机器人右轮,在使用rviz2查看效果时terminal回报Warning,请问是什么原因?是什么造成警报的?详细信息如下
warning信息:
[rviz2-3] Warning: Invalid frame ID "right_wheel_link" passed to canTransform argument source_frame - frame does not exist模型效果:
终端输出:
$ ros2 launch fishbot_description display_rviz2.launch.py [INFO] [launch]: All log files can be found below /home/ae/.ros/log/2023-05-16-15-20-14-965838-ae-ubuntu-22-9248 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [robot_state_publisher-1]: process started with pid [9249] [INFO] [joint_state_publisher_gui-2]: process started with pid [9251] [INFO] [rviz2-3]: process started with pid [9253] [rviz2-3] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway. [robot_state_publisher-1] [WARN] [1684221615.098850601] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future. [robot_state_publisher-1] [INFO] [1684221615.103959799] [robot_state_publisher]: got segment base_link [robot_state_publisher-1] [INFO] [1684221615.104012749] [robot_state_publisher]: got segment imu_link [robot_state_publisher-1] [INFO] [1684221615.104019117] [robot_state_publisher]: got segment laser_link [robot_state_publisher-1] [INFO] [1684221615.104023186] [robot_state_publisher]: got segment right_wheel_link [rviz2-3] [INFO] [1684221615.368455227] [rviz2]: Stereo is NOT SUPPORTED [rviz2-3] [INFO] [1684221615.368700274] [rviz2]: OpenGl version: 4.3 (GLSL 4.3) [rviz2-3] [INFO] [1684221615.402794128] [rviz2]: Stereo is NOT SUPPORTED [joint_state_publisher_gui-2] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway. [rviz2-3] Warning: Invalid frame ID "right_wheel_link" passed to canTransform argument source_frame - frame does not exist [rviz2-3] at line 93 in ./src/buffer_core.cpp [rviz2-3] Warning: Invalid frame ID "right_wheel_link" passed to canTransform argument source_frame - frame does not exist [rviz2-3] at line 93 in ./src/buffer_core.cpp [joint_state_publisher_gui-2] [INFO] [1684221615.789086657] [joint_state_publisher_gui]: Centering机器人URDF文件:
<?xml version="1.0"?> <robot name="fishbot"> <!-- base link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <cylinder length="0.12" radius="0.10"/> </geometry> <material name="blue"> <color rgba="0.1 0.1 1.0 0.5" /> </material> </visual> </link> <!-- laser link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.02" radius="0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.8" /> </material> </visual> </link> <!-- laser joint --> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" /> </joint> <!-- imu link --> <link name="imu_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <box size="0.01 0.01 0.01" /> </geometry> <material name="red"> <color rgba="1.0 0.1 0.1 0.8" /> </material> </visual> </link> <!-- imu joint--> <joint name="imu_joint" type="fixed"> <parent link="base_link" /> <child link="imu_link" /> <origin xyz="0 0 0.02" /> </joint> <!-- right wheel link --> <link name="right_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.57079 0 0" /> <geometry> <cylinder length="0.04" radius="0.032" /> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </visual> </link> <!-- right wheel joint--> <joint name="right_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel_link" /> <origin xyz="-0.02 -0.10 -0.06" /> <axis xyz="0 1 0" /> </joint> </robot> -
@342918498 如果是启动时报一下没关系,因为 rviz 启动太快了,没来得及更新tf信息,如果一直报就是tf有问题了他