navi导航停车抱死
-
走一厘米不到就停了 然后就一直是蜂鸣声
-
@2496480233
起先在安装依赖git clone https://github.com/fishros/fishbot.git -b v1.0.0 --depth=1 cd fishbot rosdep install --from-paths src --ignore-src -y -r # 安装依赖执行这步时出现错误
ERROR: the following packages/stacks could not have their rosdep keys resolved to system dependencies: fishbot_description: Cannot locate rosdep definition for [ament_python] Continuing to install resolvable dependencies... #All required rosdeps installed successfully然后在 colcon build报错
Starting >>> fishbot_bringup Starting >>> fishbot_cartographer Finished <<< fishbot_cartographer [0.12s] Starting >>> fishbot_description Finished <<< fishbot_bringup [0.31s] Starting >>> fishbot_interfaces --- stderr: fishbot_interfaces CMake Error at /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:240 (list): list index: 1 out of range (-1, 0) Call Stack (most recent call first): CMakeLists.txt:29 (rosidl_generate_interfaces) CMake Error at /opt/ros/humble/share/rosidl_generator_c/cmake/rosidl_generator_c_generate_interfaces.cmake:69 (message): Target dependency '/fishbot/build/fishbot_interfaces/rosidl_adapter/fishbot_interfaces/srv/FishBotConfig.idl' does not exist Call Stack (most recent call first): /opt/ros/humble/share/ament_cmake_core/cmake/core/ament_execute_extensions.cmake:48 (include) /opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:286 (ament_execute_extensions) CMakeLists.txt:29 (rosidl_generate_interfaces) --- Failed <<< fishbot_interfaces [0.30s, exited with code 1] Aborted <<< fishbot_description [0.63s] Summary: 2 packages finished [0.89s] 1 package failed: fishbot_interfaces 1 package aborted: fishbot_description 2 packages had stderr output: fishbot_description fishbot_interfaces 1 package not processed后续在src文件夹中加入了https://github.com/ament/ament_lint中的文件 虽然colcon buitld仍然报错 但是没有影响后续运行
之后在执行下列指令后source install/setup.bash ros2 launch fishbot_navigation2 navigation2.launch.py标记起点和终点的数据后 小车向左转动5°左右停车 然后有蜂鸣声 执行三次向左转动5°后彻底停车 左下方navigation 2 插件显示状态为aborted 终端info输出为 goal failed
ubuntu 22.04
humble -
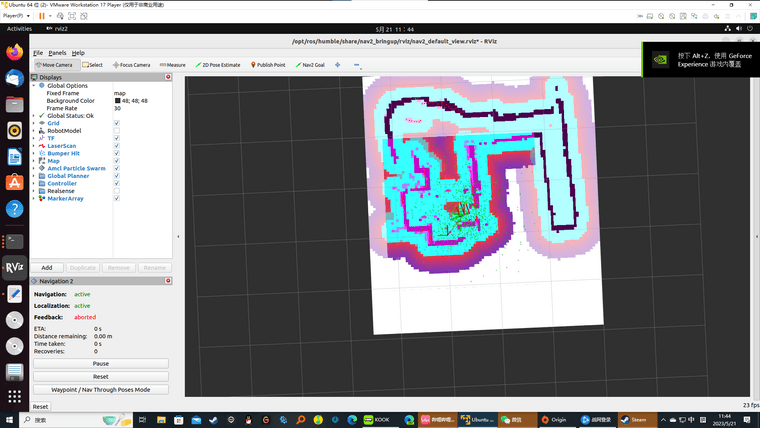
navi2 截图
[rviz2-2] Start navigation [rviz2-2] [INFO] [1684640655.389216028] [rviz2]: NavigateToPose will be called using the BT Navigator's default behavior tree. [component_container_isolated-1] [INFO] [1684640655.391752848] [bt_navigator]: Begin navigating from current location to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640655.393030124] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640655.393238111] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640655.393580970] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640655.413169215] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [rviz2-2] [INFO] [1684640655.502392748] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640646.329 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.028722875] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640646.942 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.034835386] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.024 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.278022603] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.276 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.402100352] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.328 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [WARN] [1684640656.409390242] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640656.409423315] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640656.409431755] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640656.422599214] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640656.423534058] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [rviz2-2] [INFO] [1684640656.527217694] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.458 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.528284948] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.401 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.528709832] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.526 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.651990013] [rviz2]: Message Filter dropping message: frame 'odom' at time 1684640647.635 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.653736851] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.651 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640656.777409653] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.776 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640657.027232558] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640647.901 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [rviz2-2] [INFO] [1684640657.027753967] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1684640648.026 for reason 'the timestamp on the message is earlier than all the data in the transform cache' [component_container_isolated-1] [WARN] [1684640657.401699353] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640657.401763568] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640657.401772909] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640657.412444882] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640658.409614719] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640658.409684623] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640658.409696544] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640658.431874735] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640658.431968061] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640658.532312442] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640658.532346604] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640658.532356415] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640658.560209948] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640663.561947939] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640663.596017219] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640663.596061031] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640663.596068862] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640663.612621966] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640664.409307189] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640664.409351021] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640664.409359701] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640664.422471260] [behavior_server]: Running backup [component_container_isolated-1] [WARN] [1684640664.422703952] [behavior_server]: Collision Ahead - Exiting DriveOnHeading [component_container_isolated-1] [WARN] [1684640664.422717213] [behavior_server]: backup failed [component_container_isolated-1] [WARN] [1684640664.422723973] [behavior_server]: [backup] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640664.433902120] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640664.434469418] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640665.408203677] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640665.408253249] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640665.408262210] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640665.422219073] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640666.405216910] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640666.405269292] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640666.405279032] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640666.417142461] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640666.417216425] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640666.517740731] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640666.517776583] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640666.517784163] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640666.542622255] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640671.543672781] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640671.577536464] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640671.577600906] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640671.577608957] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640671.592772954] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640672.408980348] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640672.409025140] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640672.409035010] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640672.431500145] [behavior_server]: Running backup [component_container_isolated-1] [WARN] [1684640672.431690360] [behavior_server]: Collision Ahead - Exiting DriveOnHeading [component_container_isolated-1] [WARN] [1684640672.431702690] [behavior_server]: backup failed [component_container_isolated-1] [WARN] [1684640672.431708490] [behavior_server]: [backup] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640672.452615442] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap [component_container_isolated-1] [INFO] [1684640672.453219799] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640673.406357526] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640673.406403647] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640673.406412347] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640673.422510530] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640674.406706805] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640674.406751966] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640674.406760327] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640674.426272357] [behavior_server]: Running spin [component_container_isolated-1] [INFO] [1684640674.426435611] [behavior_server]: Turning 1.57 for spin behavior. [component_container_isolated-1] [WARN] [1684640674.526948197] [behavior_server]: Collision Ahead - Exiting Spin [component_container_isolated-1] [WARN] [1684640674.526984018] [behavior_server]: spin failed [component_container_isolated-1] [WARN] [1684640674.526991238] [behavior_server]: [spin] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640674.565445574] [behavior_server]: Running wait [component_container_isolated-1] [INFO] [1684640679.566206836] [behavior_server]: wait completed successfully [component_container_isolated-1] [WARN] [1684640679.602154863] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640679.602221363] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640679.602232774] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [INFO] [1684640679.612462329] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1684640680.409568476] [planner_server]: GridBased: failed to create plan with tolerance 0.50. [component_container_isolated-1] [WARN] [1684640680.409622657] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03) [component_container_isolated-1] [WARN] [1684640680.409631517] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [ERROR] [1684640680.432466604] [bt_navigator]: Goal failed [component_container_isolated-1] [WARN] [1684640680.432512194] [bt_navigator]: [navigate_to_pose] [ActionServer] Aborting handle.终端输出
-
@2496480233 在 navi导航停车抱死 中说:
Planning algorithm GridBased failed to generate a valid path to (1.62, -0.03)
地图看起来很乱,带点的都是障碍物,看提示是找不到过去的路径
-
@小鱼
您看 我拍的就是地图中这一大片红色 这些地方现实中明明是空的啊 -
@2496480233

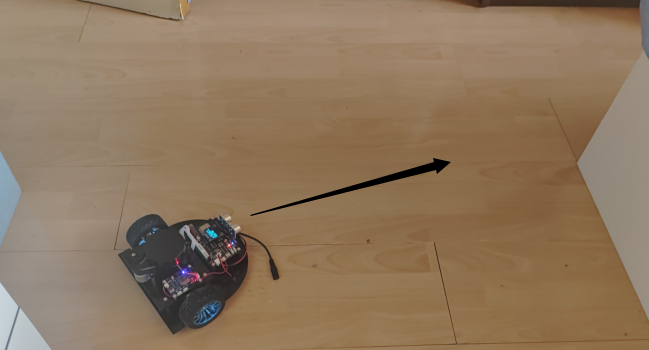
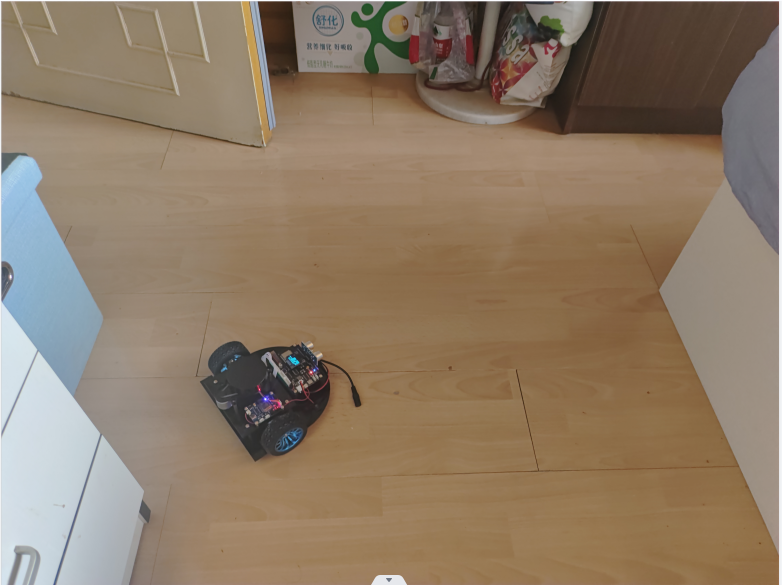
这是我给navi2发的起止点 以及在现实中的点 这中间没有障碍物啊 -
@2496480233 原始地图贴一下,看看图建的咋样
-
@小鱼
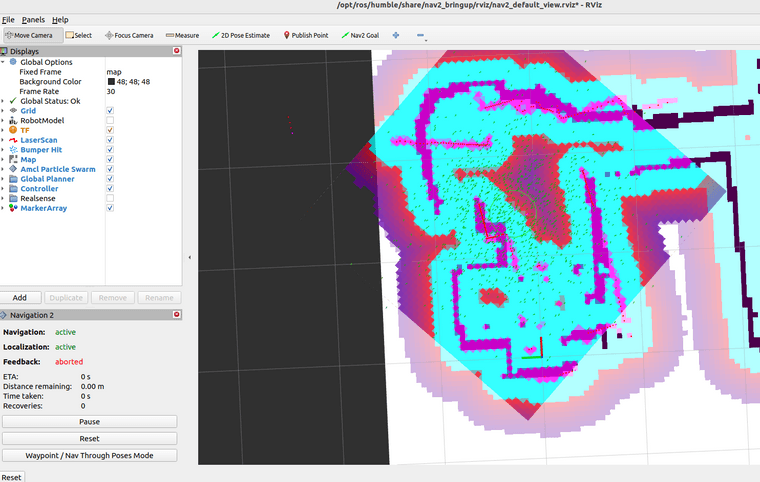
 这个是原始地图
这个是原始地图