小车的导航功能无法实现,打开rviz时雷达驱动报警告
-
@小鱼
打开rviz的瞬间雷达驱动出现警告#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.2', 8888), raddr=('192.168.43.119', 53359)> 4
PTY: Opened /dev/pts/6 for 0.0.0.0:8888
[YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[YDLIDAR]:SDK Version: 1.4.5
[YDLIDAR]:Lidar running correctly ! The health status: good
[YDLIDAR]:Fixed Size: 290
[YDLIDAR]:Sample Rate: 3K
[YDLIDAR INFO] Current Sampling Rate : 3K
[YDLIDAR INFO] Now YDLIDAR is scanning ......
[WARN] [1686568383.446067145] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY -
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼
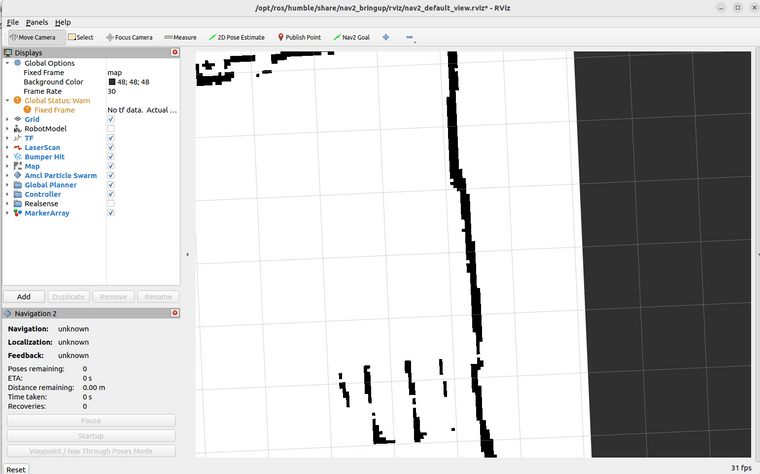
这个小车是在鱼香小铺买的599版的小车,ros2,humble,22.04其他的功能都正常,就是导航的时候,在rviz上选择当前小车的位置的时候失败,同时雷达驱动出现WARN。
我还缺少哪些信息吗,我是小白,不太明白,恳请回答。[WARN] [1686568383.446067145] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY
-
@yanghong2000719 在 小车的导航功能无法实现,打开rviz时雷达驱动报警告 中说:
[WARN] [1686568383.446067145] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY
雷达这个是正常的,你有初始化位置吗,另外将导航终端所有日志加上看看
-
@小鱼
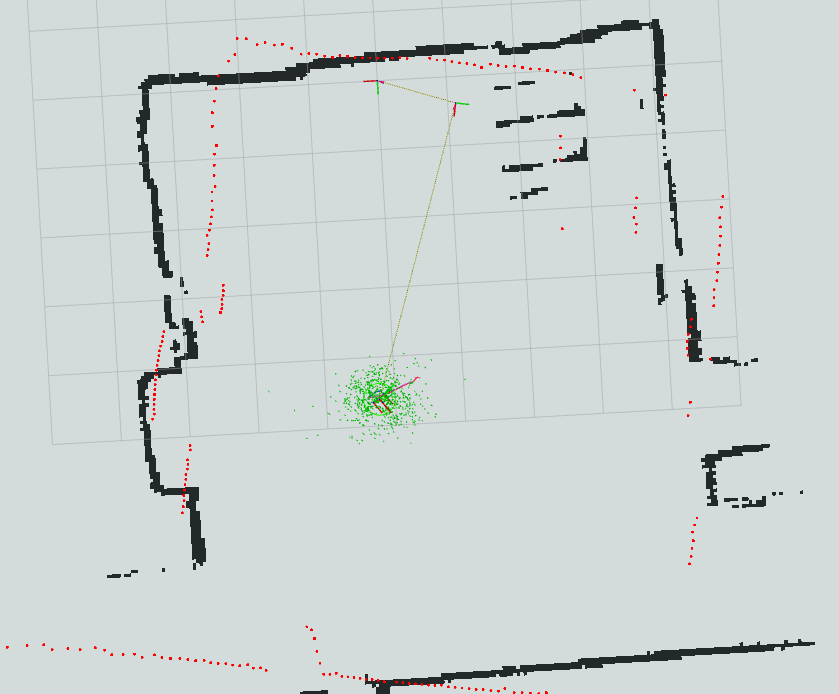
如果初始化位置是在rviz里选2D Pose Estimate ,那么我有时候点击2D Pose Estimate 初始化坐标选择了小车的位置没反映,有时候生成代价之后导航小车没走几步就error Failed to get scan 之后就不走了。
另外小车在很空旷的地方导航也不走直线总是拐很多弯,而且最后很难到达终点,基本上都在半路停了,再选择新的目标点也不走了。总之就是我这个小车的导航很不稳定,请问怎么解决
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~ 1) 驱动雷达 2) 建图测试 3) 退出 #? 1 UART2SOCKET:8888->/tmp/fishbot_laser Prepare to Accept connect! 3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.2', 8888), raddr=('192.168.43.119', 53645)> 4 PTY: Opened /dev/pts/6 for 0.0.0.0:8888 [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [YDLIDAR]:SDK Version: 1.4.5 [YDLIDAR]:Lidar running correctly ! The health status: good [YDLIDAR]:Fixed Size: 300 [YDLIDAR]:Sample Rate: 3K [YDLIDAR INFO] Current Sampling Rate : 3K [YDLIDAR INFO] Now YDLIDAR is scanning ...... [WARN] [1686658141.472430057] [ydlidar_node]: New subscription discovered on topic '/scan', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY [ERROR] [1686658182.780633488] [ydlidar_node]: Failed to get scan timout count: 1 [ERROR] [1686658184.781702401] [ydlidar_node]: Failed to get scan [YDLIDAR] Connection established in [/tmp/fishbot_laser][115200]: Firmware version: 0.3 Hardware version: 0 Model: T1 Serial: 2016050500000432 -
@yanghong2000719 看上面的图是有 雷达数据,提供下详细 的数据,系统,网络情况 ,版本,前后操作等,小车是什么版本的
-
@小鱼
系统是ubu22.04 网络就是手机热点 2.4g,小车版本怎么看阿,V1.0.0.20230522 配置助手:xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py这个是吗,当时用这个配置的,当我选了目标点之后小车开始动结果没动几下就停了,我看了一下终端就看到雷达那块报错了,之后我再选择新目标点,就又报错了一次,其他的都是按照流程操作的,另外,小车slam和导航的源码在哪里看呀
-
@yanghong2000719 先换一下固件版本,0522这一版有些问题,回退一下。另外提供下nav2终端详情,最后就是
不要用手机热点!
不要用手机热点!
不要用手机热点!