Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
fishbot主控板连接的红米AC2100路由器下面大概有20个设备,运行的时候经常会出现断连的情况。
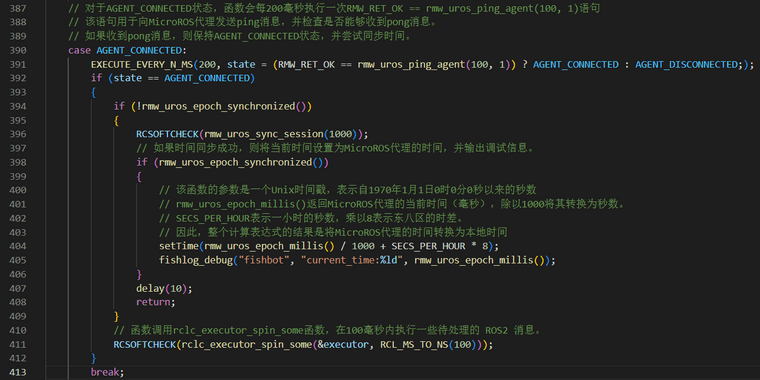
我觉得fishbot_motion_control_microros/src/fishbot.cpp第391行的判断条件可以再宽松一点。
fishbot_motion_control_microros/src/fishbot.cpp
修改rmw_uros_ping_agent的参数之后解决了我的问题。
rmw_uros_ping_agent
另外,为了安全性,是否可以增加一个断连之后停止小车的功能?