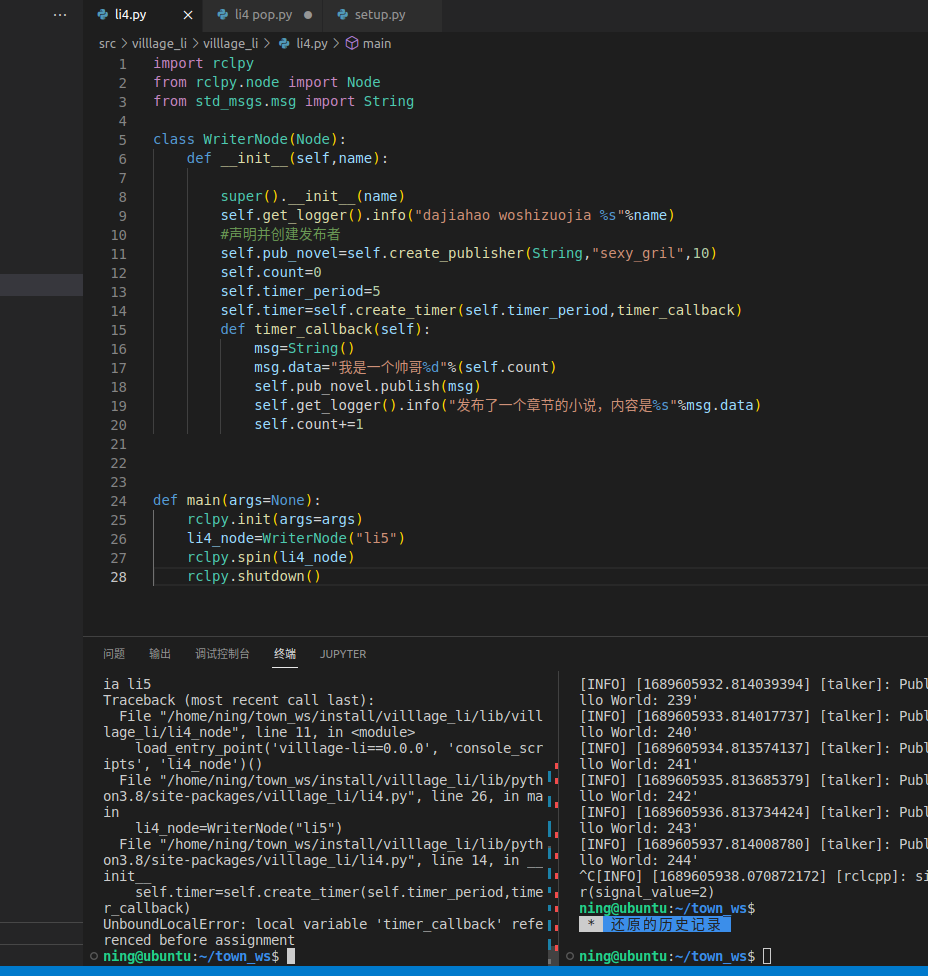
建立话题发布的时候提示timer_callback referenced before assignment
-
求解答! -
@JerryNing 代码缩进有问题,退格一下:

另外
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 更改之后还是会提醒未声名timer_callback
import rclpy
from rclpy.node import Node
from std_msgs.msg import String,UInt32class WriterNode(Node):
def init(self,name):super().__init__(name) self.get_logger().info("dajiahao woshizuojia %s"%name) #声明并创建发布者 self.pub_novel=self.create_publisher(String,"sexy_gril",10) self.count=0 self.timer_period=5 self.timer=self.create_timer(self.timer_period,timer_callback) self.account=80 self.syb_money=self.create_subscription(UInt32,"sexy_girl_money",self.recv_money_callback,10) def recv_money_callback(self,money): self.account+=money.data self.get_logger().info("shoudaole%ddegaofei xianzaizhanghuliyou%dqian"%(money.data,self.count)) def timer_callback(self): msg=String() msg.data="我是一个帅哥%d"%(self.count) self.pub_novel.publish(msg) self.get_logger().info("发布了一个章节的小说,内容是%s"%msg.data) self.count+=1def main(args=None):
rclpy.init(args=args)
li4_node=WriterNode("li5")
rclpy.spin(li4_node)
rclpy.shutdown() -
此回复已被删除! -
@JerryNing 在 建立话题发布的时候提示timer_callback referenced before assignment 中说:
self.timer=self.create_timer(self.timer_period,timer_callback)
self.timer_callback