ros2 c++实现JY_95T IMU解算三轴 加速度 角速度 欧拉角 磁力计 四元数
-


imu传感器数据解算原理:
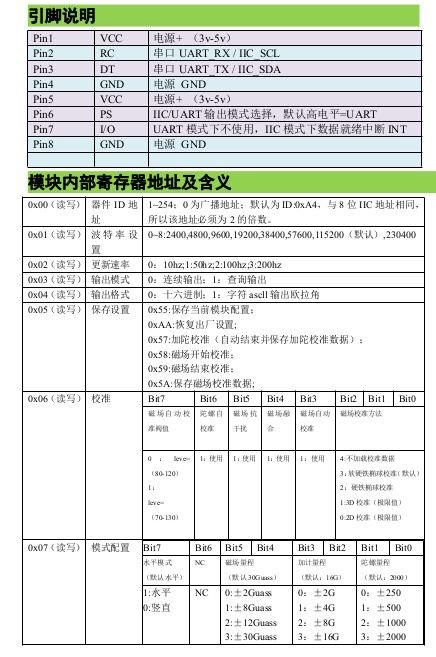
此款imu内置44个寄存器,每个寄存器存储一个字节的数据,对应于不同的功能,具体功能参考上面的使用说明,其中8-42号寄存器储存的是imu的3个轴的实时数据,我们的目的就是通过c++读取这35个寄存器数据并加以解算。从串口读取到的一个完整的数据帧包含40位数据,0-3位4个Byte是imu的配置信息,4-38位35个Byte是数据信息,39位是校验和低八位。下面的程序就围绕这个原理展开。运行环境:ubuntu 20.04 ros2 foxy
目录结构:
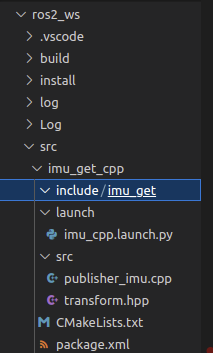
imu_cpp.launch.py#!/usr/bin/python3 from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch_ros.actions import Node def generate_launch_description(): imu_node = Node(package='imu_get_cpp', executable='publisher_imu_node', name='publisher_imu_node', output='screen', ) return LaunchDescription([ imu_node, ])publisher_imu.cpp
#include <chrono> #include <math.h> #include "serial/serial.h" //导入串口库,ros2不带串口库,需要单独安装 #include <memory.h> #include "std_msgs/msg/string.hpp" #include "sensor_msgs/msg/magnetic_field.hpp" #include "sensor_msgs/msg/imu.hpp" #include "tf2/LinearMath/Quaternion.h" #include "tf2_ros/transform_broadcaster.h" #include "tf2_ros/static_transform_broadcaster.h" #include "nav_msgs/msg/odometry.hpp" #include <string> #include "rclcpp/rclcpp.hpp" #include "transform.hpp" serial::Serial ser; using namespace std::chrono_literals; class publisher_imu_node : public rclcpp::Node// 创建imu发布类继承自rclcpp::Node { private: std::string port; //端口名 int baudrate; //波特率查看硬件说明 transform_imu imu_fetch; //创建imu获取对象 rclcpp::TimerBase::SharedPtr timer_; //创建定时器 rclcpp::Publisher<sensor_msgs::msg::Imu>::SharedPtr pub_imu; // 创建发布者 public: publisher_imu_node() : Node("publisher_imu_node") //构造函数 { port = "/dev/ttyUSB0"; // 根据自己的主机修改串口号 baudrate = 115200; // 波特率,imu在波特率115200返回数据时间大概是1ms,9600下大概是10ms try { ser.setPort(port); //设置端口 ser.setBaudrate(baudrate); //设置波特率 serial::Timeout to = serial::Timeout::simpleTimeout(1); //设置超时 ser.setTimeout(to); ser.open(); //打开串口 } catch (serial::IOException &e) { RCLCPP_INFO(this->get_logger(), "不能打开端口 "); return; } if (ser.isOpen()) { RCLCPP_INFO(this->get_logger(), "imu串口初始化完成!"); unsigned char cmd_buffer[5] ={0xA4,0x03,0x08,0x23,0xD2}; //JY-95T启用35个寄存器 需要发送的串口包命令 ser.write(cmd_buffer,5); //JY-95T可以根据命令选择工作方式 printf("imu发出命令: %x %x %x %x %x\n",cmd_buffer[0],cmd_buffer[1],cmd_buffer[2],cmd_buffer[3],cmd_buffer[4]); } else { RCLCPP_INFO(this->get_logger(), "Serial Port ???"); return; } pub_imu = this->create_publisher<sensor_msgs::msg::Imu>("/imu_data", 20);//创建了话题 /imu_data // 创建定时器,100ms为周期,定时发布,这个时间设置超过200毫秒发布的数据卡顿 timer_ = this->create_wall_timer(100ms, std::bind(&publisher_imu_node::timer_callback, this)); printf("imu发布线程工作中\n"); } public: void timer_callback() //定时器的回调函数,每20毫秒回调一次 { int count = ser.available(); // 读取到缓存区数据的字节数 if (count > 0) { int num; rclcpp::Time now = this->get_clock()->now(); // 获取时间戳 std::vector<unsigned char> read_buf(count);//这里定义无符号,是因为read函数的形参是无符号 num = ser.read(&read_buf[0], count); // 读出缓存区缓存的数据,返回值为读到的数据字节数 imu_fetch.FetchData(read_buf, num); sensor_msgs::msg::Imu imu_data; //----------------imu data填充数据---------------- imu_data.header.stamp = now; imu_data.header.frame_id = "imu_link"; //imu_data.header.frame_id = "map"; //加速度 imu_data.linear_acceleration.x = imu_fetch.acc_x; imu_data.linear_acceleration.y = imu_fetch.acc_y; imu_data.linear_acceleration.z = imu_fetch.acc_z; //角速度 imu_data.angular_velocity.x = imu_fetch.gyro_x ; imu_data.angular_velocity.y = imu_fetch.gyro_y ; imu_data.angular_velocity.z = imu_fetch.gyro_z ; //四元数 imu_data.orientation.x = imu_fetch.quat_Q0; imu_data.orientation.y = imu_fetch.quat_Q1; imu_data.orientation.z = imu_fetch.quat_Q2; imu_data.orientation.w = imu_fetch.quat_Q3; pub_imu->publish(imu_data); //向话题放数据 /* Author: Mao Haiqing Time: 2023.7.6 description: 读取IMU数据 */ } } }; int main(int argc, char *argv[]) { rclcpp::init(argc, argv); auto node = std::make_shared<publisher_imu_node>();//创建对应节点的共享指针对象 rclcpp::spin(node); //运行节点,并检测退出信号 printf("imu线程退出\n"); rclcpp::shutdown(); return 0; }transform.hpp
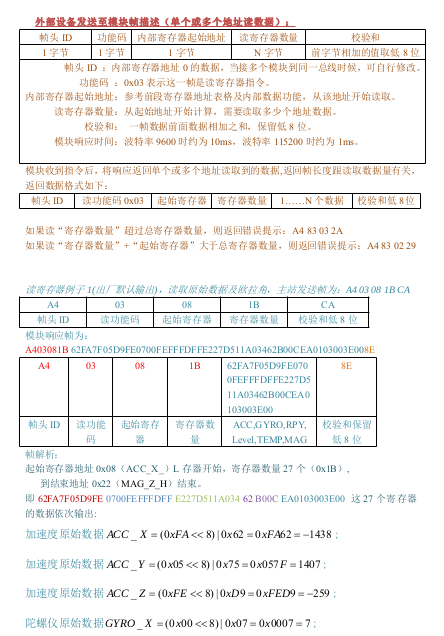
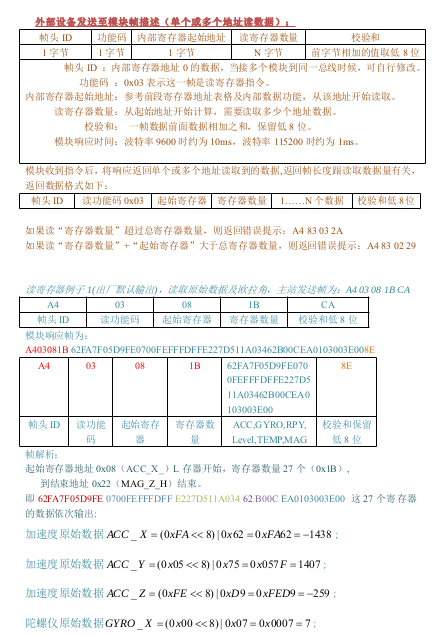
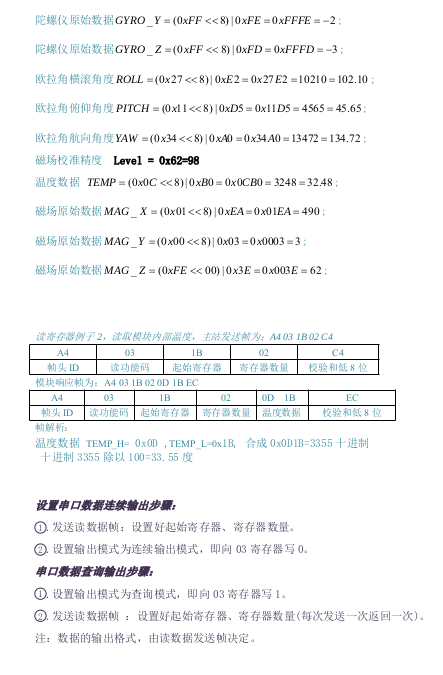
#include <string> #include <ctype.h> #include <float.h> #include <math.h> class transform_imu { public: double acc_x=0;//加速度 double acc_y=0; double acc_z=0; double gyro_x=0; //陀螺仪角速度 double gyro_y=0; double gyro_z=0; double angle_r=0; //欧拉角 double angle_p=0; double angle_y=0; double temp=0; //imu温度计 double mag_x=0; //磁力计 double mag_y=0; double mag_z=0; double quat_Q0=0; //四元数 double quat_Q1=0; double quat_Q2=0; double quat_Q3=0; public: transform_imu(){}; //默认构造函数 ~transform_imu(){}; //析构函数 // void FetchData(auto &data, int usLength) //获取数据 void FetchData(std::vector<unsigned char> &data, int usLength) { int index = 0; unsigned char sum=0; //for(int i = 0;i < usLength;i++){printf("%x ",data[i]);} //打印数据,查看收到的数据是否正确 while (usLength >= 40)//一个完整数据帧40字节[0xA4,0x03,0x08,0x23,数据35字节,校验位] { // 收到的数据开头4位:0xA4 帧头,0x03 读取,0x08 从8号寄存器开始,0x23 35个寄存器 if (data[index] != 0xA4)//0xA4是协议头 { index++;//指针(/索引)后移,继续找协议帧头 usLength--; continue; } //printf("找到数据包帧头,index是%d,uslength=%d\n",index,usLength);//每一次读取的数据长度 if(data[index + 1] != 0x03) //判断第二个数据是否正确 { // printf("第2数据包内容不对,进入下个循环"); usLength = usLength - 40; index += 40; continue; } // printf("读imu数据\n"); if(data[index + 2] != 0x08) //判断第3个数据是否正确 { printf("第三数据包内容不对,进入下个循环"); usLength = usLength - 40; index += 40; continue; } // printf("第08寄存器是数据\n"); if(data[index + 3] != 0x23) //判断第4个数据是否正确 { //printf("第四数据包内容不对,进入下个循环\n"); usLength = usLength - 40; index += 40; continue; } //printf("35个数据包\n"); //0-39字节相加的值取低8位与第40位校验,参考GY-95T 九轴模块使用说明 for(int i=index;i<index+40;i++) //前39为求和 { sum=0+data[i]; } if(sum != data[index+39]) //判断前39个数据的和是否与第40位相等 { //printf("校验和不对,进入下个循环\n"); usLength = usLength - 40; index += 40; continue; } // printf("校验和通过,数据没有问题\n"); /* 根据模块使用说明可知,一个完整数据帧40字节[0xA4,0x03,0x08,0x23,数据35字节,校验位] 1.开头4位:0xA4 帧头,0x03 读取,0x08 数据位从8号寄存器开始,0x23 35个寄存器 2.加速度位:4-9 3.陀螺仪位:10-15 4.欧拉角:16-21 5.磁场校准:22 6.器件温度:23-24 5.磁场:25-30 6.四元数:31-38 数据解析一定注意2个字节拼在一起用short类型,然后在转换成double类型,总体加小括号在作除法, 否则short类型作除法会被截断降低精度,表现在图形显示界面会卡,数据不流畅。拼好的数据单位参考 使用手册。 */ // 加速度 acc_x = ((double)((short)(data[index + 5]<<8 | data[index + 4])))/2048 * 9.8; //单位m/s^2 acc_y = ((double)((short)(data[index + 7]<<8 | data[index + 6])))/2048 * 9.8; acc_z = ((double)((short)(data[index + 9]<<8 | data[index + 8])))/2048 * 9.8; // 陀螺仪角速度 gyro_x = ((double)((short)(data[index + 11]<<8 | data[index + 10])))/16.4*3.1415926 / 180.0; //单位rad/sec gyro_y = ((double)((short)(data[index + 13]<<8 | data[index + 12])))/16.4*3.1415926 / 180.0; gyro_z = ((double)((short)(data[index + 15]<<8 | data[index + 14])))/16.4*3.1415926 / 180.0; //欧拉角 // angle_r = ((double)((short)(data[index + 17]<<8 | data[index + 16])))/100 ; // angle_p = ((double)((short)(data[index + 19]<<8 | data[index + 18])))/100 ; // angle_y = ((double)((short)(data[index + 21]<<8 | data[index + 20])))/100 ; //imu温度 temp = ((double)((short)(data[index + 24]<<8 | data[index + 23])))/100 ; //单位摄氏度 //磁力计 // mag_x = ((double)((short)(data[index + 26]<<8 | data[index + 25]))); // mag_y = ((double)((short)(data[index + 28]<<8 | data[index + 27]))); // mag_z = ((double)((short)(data[index + 30]<<8 | data[index + 29]))); //四元数 quat_Q0 = ((double)((short)(data[index + 32]<<8 | data[index + 31])))/10000 ; //无单位 quat_Q1 = ((double)((short)(data[index + 34]<<8 | data[index + 33])))/10000 ; quat_Q2 = ((double)((short)(data[index + 36]<<8 | data[index + 35])))/10000 ; quat_Q3 = ((double)((short)(data[index + 38]<<8 | data[index + 37])))/10000 ; //JY-95T imu传感器9轴,数据解析完成,具体用什么数据可以根据实际需要选用 //调试结束后可以屏蔽以下printf //printf("加速度x y z: %lf %lf %lf\n",acc_x,acc_y,acc_z); //printf("角速度x y z: %lf %lf %lf\n",gyro_x,gyro_y,gyro_z); //printf("欧拉角r p y: %lf %lf %lf %lf\n",angle_r,angle_p,angle_y); //printf("imu温度计 %lf\n",temp); //printf("磁力计x y z: %lf %lf %lf\n",mag_x, mag_y,mag_z); //printf("四元数Q0 Q1 Q2 Q3: %lf %lf %lf %lf\n",quat_Q0,quat_Q1,quat_Q2,quat_Q3); /* Author: Mao Haiqing Time: 2023.7.6 description: 读取IMU数据 */ usLength = usLength - 40; index += 40; } } };CMakeLists.txt
cmake_minimum_required(VERSION 3.5) project(imu_get_cpp) # Default to C99 if(NOT CMAKE_C_STANDARD) set(CMAKE_C_STANDARD 99) endif() # Default to C++14 if(NOT CMAKE_CXX_STANDARD) set(CMAKE_CXX_STANDARD 14) endif() if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() # find dependencies find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) find_package(std_msgs REQUIRED) find_package(serial REQUIRED) find_package(sensor_msgs REQUIRED) find_package(rosidl_default_generators REQUIRED) #find_package(geometry_msgs) find_package(nav_msgs REQUIRED) find_package(tf2_ros REQUIRED) find_package(tf2_msgs REQUIRED) find_package(tf2_geometry_msgs REQUIRED) # uncomment the following section in order to fill in # further dependencies manually. # find_package(<dependency> REQUIRED) add_executable(publisher_imu_node src/publisher_imu.cpp src/transform.hpp) ament_target_dependencies(publisher_imu_node rclcpp std_msgs) ament_target_dependencies(publisher_imu_node rclcpp serial) ament_target_dependencies(publisher_imu_node rclcpp sensor_msgs) ament_target_dependencies(publisher_imu_node rclcpp rosidl_default_generators) ament_target_dependencies(publisher_imu_node rclcpp nav_msgs) ament_target_dependencies(publisher_imu_node rclcpp tf2_ros) ament_target_dependencies(publisher_imu_node rclcpp tf2_msgs) ament_target_dependencies(publisher_imu_node rclcpp tf2_geometry_msgs) install(TARGETS publisher_imu_node DESTINATION lib/${PROJECT_NAME}) install( DIRECTORY launch DESTINATION share/${PROJECT_NAME}) if(BUILD_TESTING) find_package(ament_lint_auto REQUIRED) # the following line skips the linter which checks for copyrights # uncomment the line when a copyright and license is not present in all source files #set(ament_cmake_copyright_FOUND TRUE) # the following line skips cpplint (only works in a git repo) # uncomment the line when this package is not in a git repo #set(ament_cmake_cpplint_FOUND TRUE) ament_lint_auto_find_test_dependencies() endif() ament_package()package.xml
<?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <package format="3"> <name>imu_get_cpp</name> <version>0.0.0</version> <description>TODO: Package description</description> <maintainer email="330406269@qq.com">m</maintainer> <license>TODO: License declaration</license> <buildtool_depend>ament_cmake</buildtool_depend> <depend>rclcpp</depend> <depend>std_msgs</depend> <depend>serial</depend> <depend>sensor_msgs</depend> <depend>nav_msgs</depend> <depend>tf2_ros</depend> <depend>tf2_msgs</depend> <depend>tf2_geometry_msgs</depend> <depend>geometry_msgs</depend> <test_depend>ament_lint_auto</test_depend> <test_depend>ament_lint_common</test_depend> <export> <build_type>ament_cmake</build_type> </export> </package>编译
colcon build --packages-select imu_get_cpp
运行
ros2 launch imu_get_cpp imu_cpp.launch.py
查看话题
ros2 topic list
/clicked_point
/goal_pose
/imu_data
/initialpose
/parameter_events
/rosout
/tf
/tf_staticros2 topic echo /imu_data
header:
stamp:
sec: 1693478860
nanosec: 800160028
frame_id: imu_link
orientation:
x: 0.0866
y: -0.0067
z: 0.0078
w: -1.636
orientation_covariance:- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:
x: 0.0010642251355013552
y: 0.0010642251355013552
z: 0.0010642251355013552
angular_velocity_covariance: - 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
linear_acceleration:
x: 0.08134765625000001
y: -0.09091796875000001
z: 9.866992187500001
linear_acceleration_covariance: - 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
数据正常,运行成功。
-
@毛哥成山轮胎机油保养 我现在有一个疑问,2种运行方式,为什么程序运行的不一样呢,终端返回的信息也不一样 ?
ros2 launch imu_get_cpp imu_cpp.launch.py[INFO] [launch]: All log files can be found below /home/m/.ros/log/2023-08-31-18-56-23-189690-ubun-13754
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [publisher_imu_node-1]: process started with pid [13756]
[publisher_imu_node-1] [INFO] [1693479383.314753546] [publisher_imu_node]: imu串口初始化完成!
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[publisher_imu_node-1] [INFO] [1693479445.030912184] [rclcpp]: signal_handler(signal_value=2)
[publisher_imu_node-1] imu发出命令: a4 3 8 23 d2
[publisher_imu_node-1] imu发布线程工作中
[publisher_imu_node-1] imu线程退出/home/m/ros2_ws/install/imu_get_cpp/lib/imu_get_cpp/publisher_imu_node
[INFO] [1693479448.843189189] [publisher_imu_node]: imu串口初始化完成!
imu发出命令: a4 3 8 23 d2
imu发布线程工作中
^C^C[INFO] [1693479476.254140522] [rclcpp]: signal_handler(signal_value=2)
imu线程退出按理说这2种运行方式都是一样的,第一种是ros2的标准运行命令,第二种是按c++的运行命令,为什么程序运行的方式不一样呢,有没有懂的大佬给解释一下,非常感谢
-
毛 毛哥成山轮胎机油保养 在 中 引用了 这个主题
-