Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
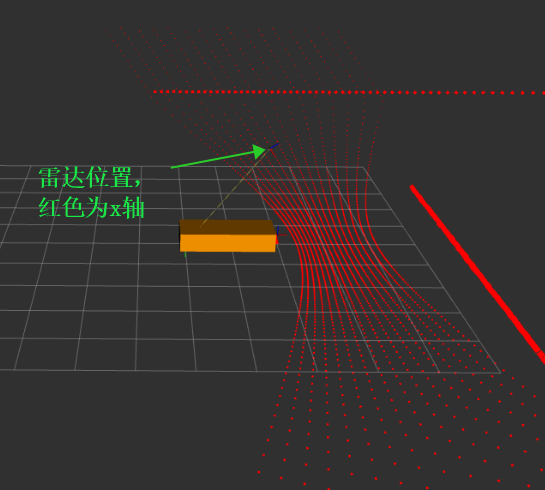
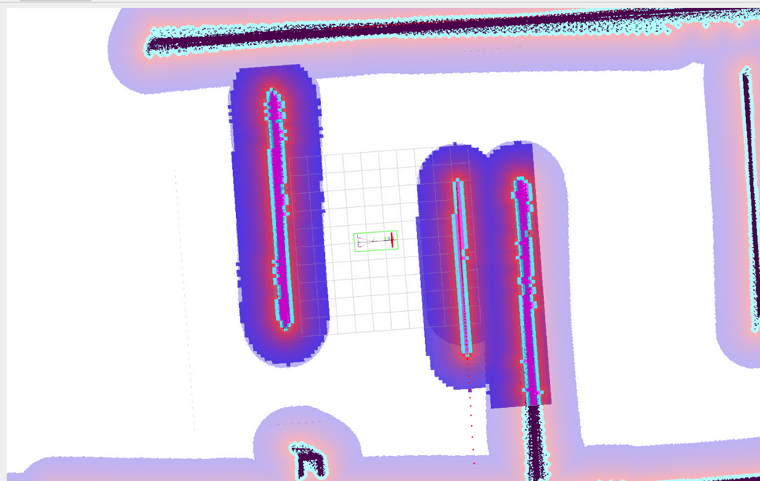
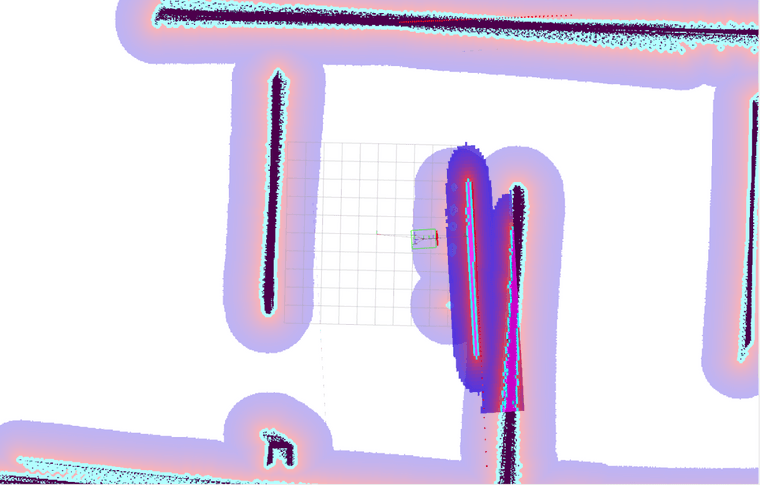
采用ros2humble仿照小鱼搭建了一个导航模型,小车通过3d激光插件进行定位,当我旋转雷达安装位置并进行初始姿态估计时,小车发生形变 姿态估计之前: 姿态估计之后: 我想知道这是怎么回事