相机深度数据转雷达数据
-
深度数据转雷达数据文件
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():
depthimage_to_laserscan_node = Node(
package='depthimage_to_laserscan',
executable='depthimage_to_laserscan_node',
name='depthimage_to_laserscan_node',
remappings=[
('depth','/camera/depth/image_raw'),
('depth_camera_info', '/camera/depth/camera_info'),
('scan', '/scan')
],
parameters=[{
'scan_time': 0.033, #扫描时间间隔,30HZ
'range_min': 0.45, #投影点的最小距离单位(米),更近的被丢弃
'range_max': 5.0, #投影点的最大距离单位(米),更远的被丢弃
'scan_height': 5, #depthimage中用于转成laserscan的行
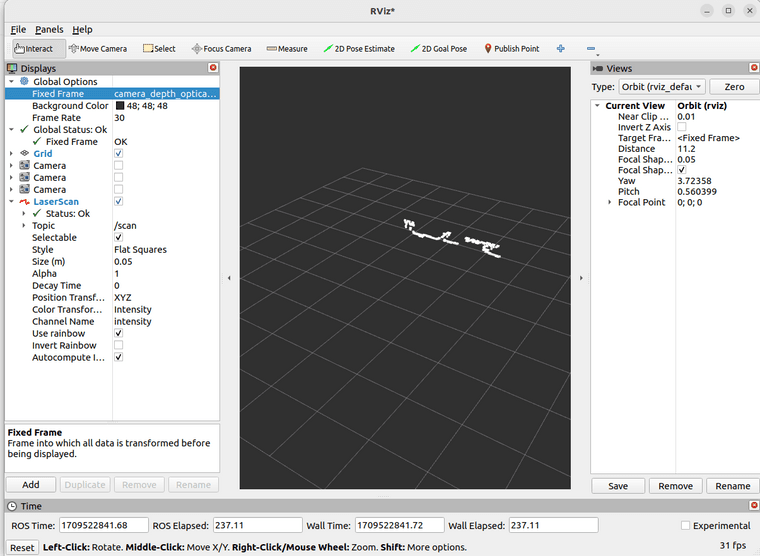
'output_frame': 'camera_depth_optical_frame' #发布的帧 ID
}]
)depthimage_to_laserscan_tf = Node( package='tf2_ros', executable='static_transform_publisher', name='depthimage_to_laserscan_tf', arguments=['0','0','0','0','0','0','1','camera_link','camera_depth_optical_frame'] ) ld = LaunchDescription() ld.add_action(depthimage_to_laserscan_node) ld.add_action(depthimage_to_laserscan_tf) return ld出现雷达数据为竖着的,
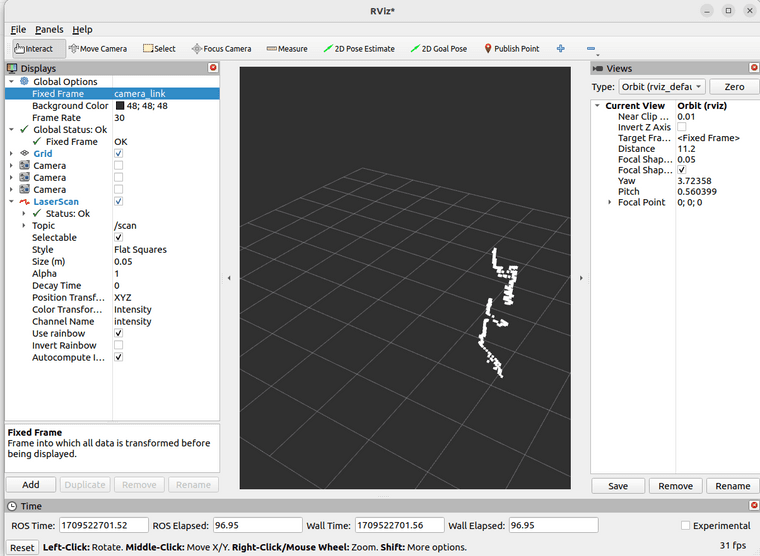
但是订阅camera_depth_optical_frame话题,数据又可以是横向的