cartographer建图可视化显示no map receiced
-
在实体机上进行cartographer建图可视化显示no map receiced。
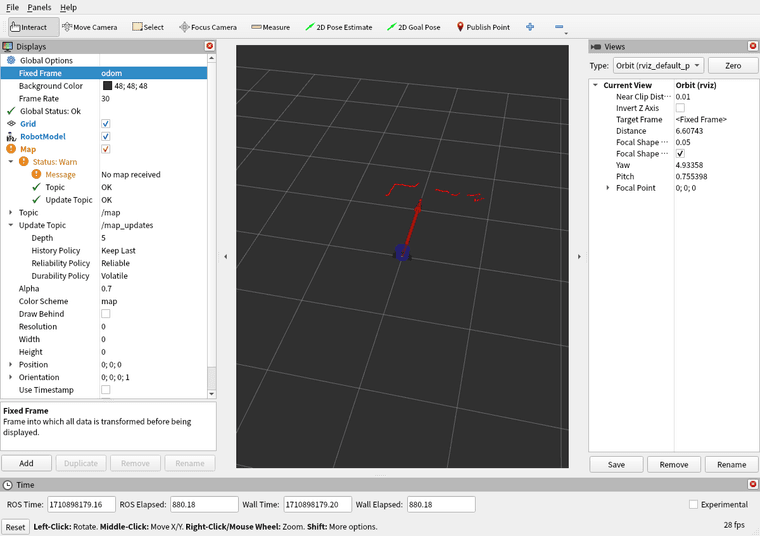
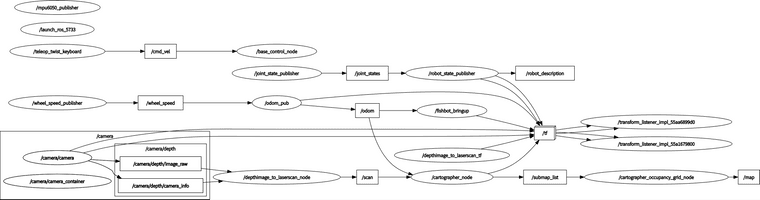
查看rqt,发现节点、话题的发布订阅没有问题
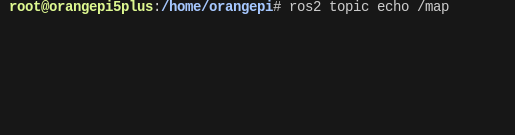
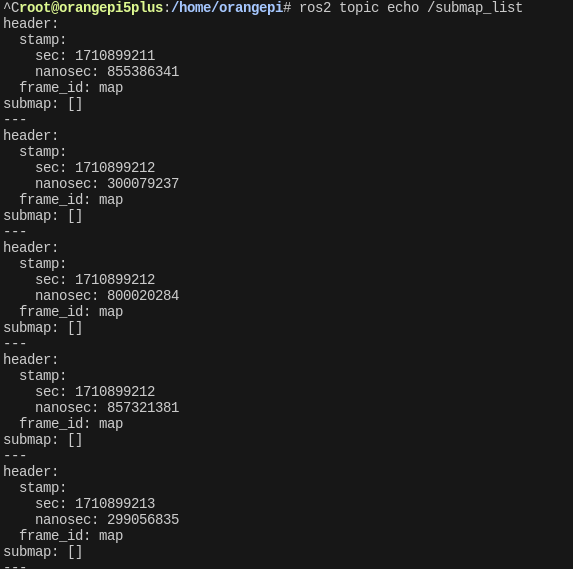
查看/map和/submap_list时发现数据为空
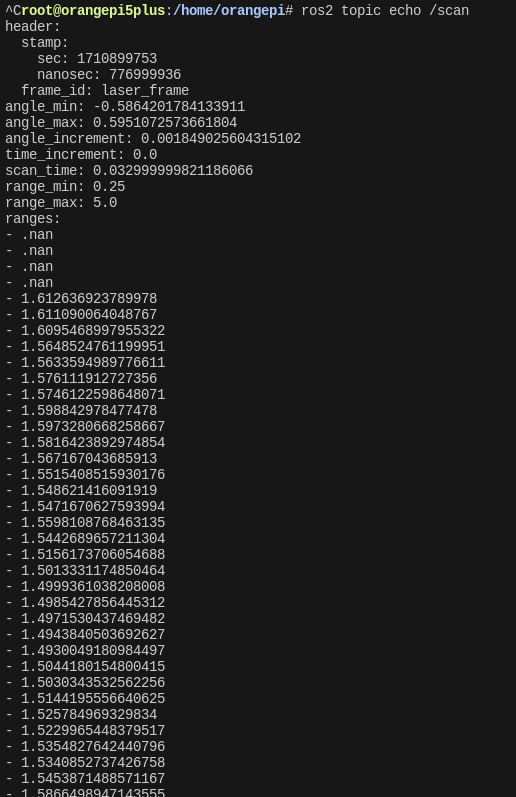
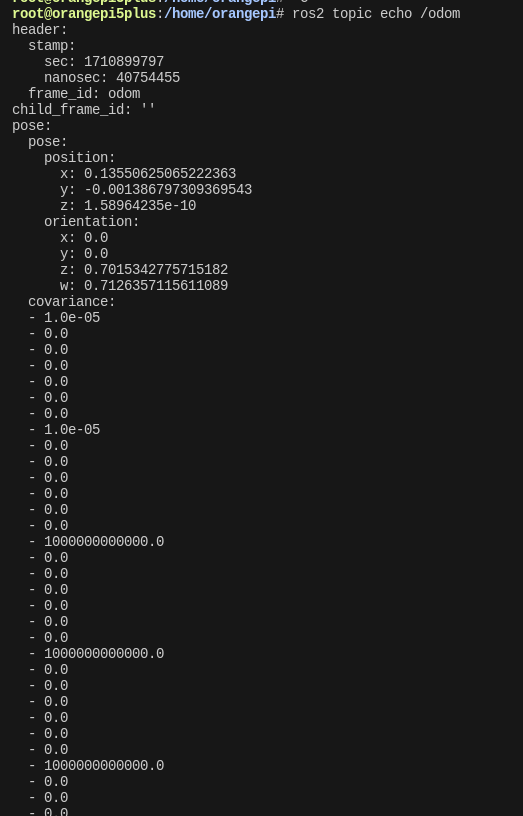
但是查看/scan和/odom是发现是有数据的
cartographer.launch.py文件如下:
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): # 定位到功能包的地址 pkg_share = FindPackageShare(package='fishbot_cartographer').find('fishbot_cartographer') #=====================运行节点需要的配置======================================================================= # 是否使用仿真时间,我们用gazebo,这里设置成true use_sim_time = LaunchConfiguration('use_sim_time', default='false') # 地图的分辨率 resolution = LaunchConfiguration('resolution', default='0.05') # 地图的发布周期 publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0') # 配置文件夹路径 configuration_directory = LaunchConfiguration('configuration_directory',default= os.path.join(pkg_share, 'config') ) # 配置文件 configuration_basename = LaunchConfiguration('configuration_basename', default='fishbot_2d.lua') rviz_config_dir = os.path.join(pkg_share, 'config')+"/cartographer.rviz" print(f"rviz config in {rviz_config_dir}") #=====================声明三个节点,cartographer/occupancy_grid_node/rviz_node================================= cartographer_node = Node( package='cartographer_ros', executable='cartographer_node', name='cartographer_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-configuration_directory', configuration_directory, '-configuration_basename', configuration_basename]) cartographer_occupancy_grid_node = Node( package='cartographer_ros', executable='cartographer_occupancy_grid_node', name='cartographer_occupancy_grid_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-resolution', resolution, '-publish_period_sec', publish_period_sec]) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') #===============================================定义启动文件======================================================== ld = LaunchDescription() ld.add_action(cartographer_node) ld.add_action(cartographer_occupancy_grid_node) ld.add_action(rviz_node) return ldfishbot_2d.lua参数文件如下:
include "map_builder.lua" include "trajectory_builder.lua" options = { map_builder = MAP_BUILDER, trajectory_builder = TRAJECTORY_BUILDER, map_frame = "map", tracking_frame = "base_link", -- base_link改为odom,发布map到odom之间的位姿态 published_frame = "odom", odom_frame = "odom", -- true改为false,不用提供里程计数据 provide_odom_frame = false, -- false改为true,仅发布2D位资 publish_frame_projected_to_2d = true, -- false改为true,使用里程计数据 use_odometry = true, use_nav_sat = false, use_landmarks = false, -- 0改为1,使用一个雷达 num_laser_scans = 1, -- 1改为0,不使用多波雷达 num_multi_echo_laser_scans = 0, -- 10改为1,1/1=1等于不分割 num_subdivisions_per_laser_scan = 1, num_point_clouds = 0, lookup_transform_timeout_sec = 0.2, submap_publish_period_sec = 0.3, pose_publish_period_sec = 5e-3, trajectory_publish_period_sec = 30e-3, rangefinder_sampling_ratio = 1., odometry_sampling_ratio = 1., fixed_frame_pose_sampling_ratio = 1., imu_sampling_ratio = 1., landmarks_sampling_ratio = 1., } -- false改为true,启动2D SLAM MAP_BUILDER.use_trajectory_builder_2d = true -- 0改成0.10,比机器人半径小的都忽略 TRAJECTORY_BUILDER_2D.min_range = 0.10 -- 30改成3.5,限制在雷达最大扫描范围内,越小一般越精确些 TRAJECTORY_BUILDER_2D.max_range = 3.5 -- 5改成3,传感器数据超出有效范围最大值 TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3. -- true改成false,不使用IMU数据,大家可以开启,然后对比下效果 TRAJECTORY_BUILDER_2D.use_imu_data = false -- false改成true,使用实时回环检测来进行前端的扫描匹配 TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true -- 1.0改成0.1,提高对运动的敏感度 TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1) -- 0.55改成0.65,Fast csm的最低分数,高于此分数才进行优化。 POSE_GRAPH.constraint_builder.min_score = 0.65 --0.6改成0.7,全局定位最小分数,低于此分数则认为目前全局定位不准确 POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7 -- 设置0可关闭全局SLAM -- POSE_GRAPH.optimize_every_n_nodes = 0 return options请问问题出现在哪里?求解
-
刚解决一个和你类似的问题,建议检查你urdf文件里定义的link命名,和你launch的节点的frame_ID的命名是不是一样的。就比如遇到这个问题的原因是我urdf 里命名的雷达link name = 'laser_link',而我launch的雷达节点传入的frame_id却是 laser,这就导致出问题了,接受不到雷达数据。虽然不知道为什么。但我修改之后就能正常建图了。你可以着重检查一下你文件里的这些命名是不是对应的