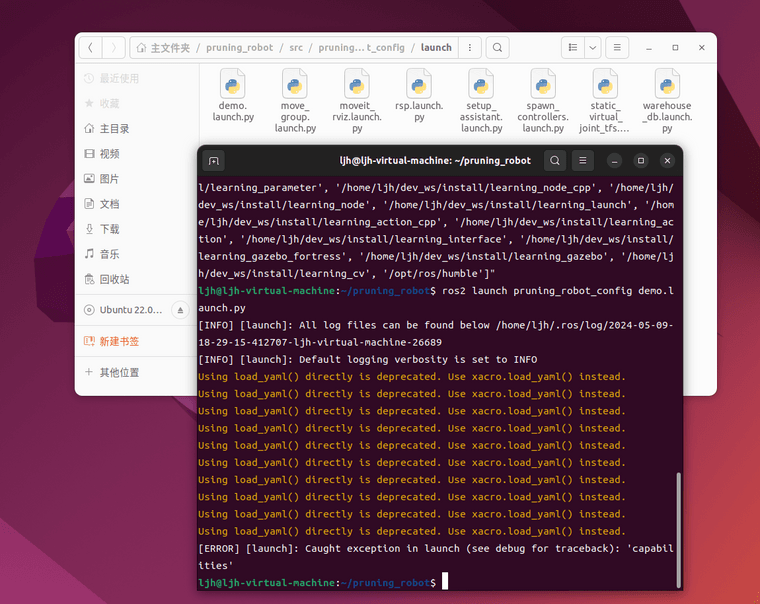
使用moveit_setup_assistant生成的包,运行demo.launch.py报错
-
求大神有无解决办法
-
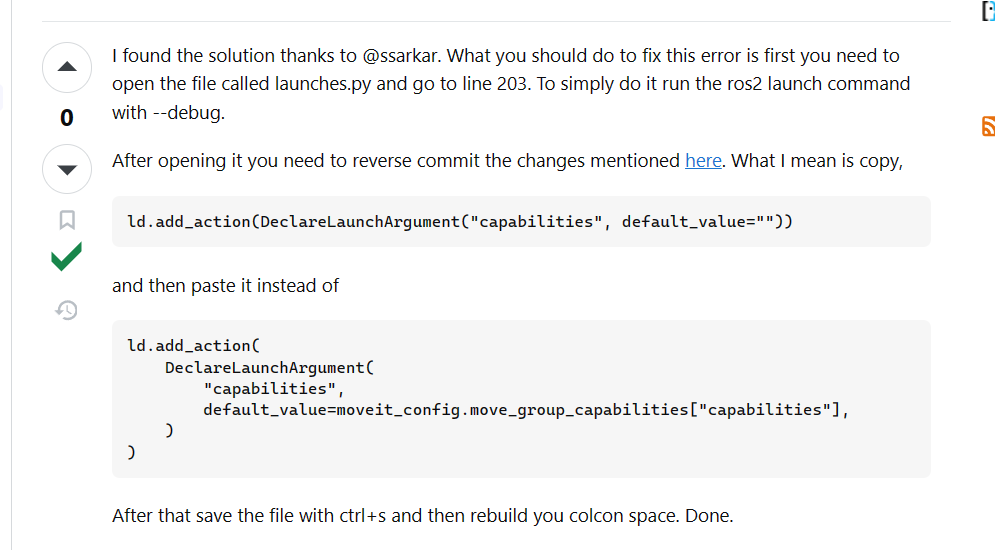
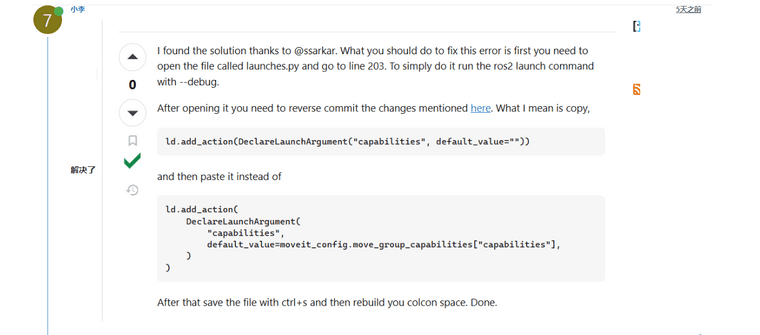
解决了
-
您好,我的moveit_setup_assistant生成的包中的launch下的demo.launch.py中的内容很短,
from moveit_configs_utils import MoveItConfigsBuilder
from moveit_configs_utils.launches import generate_demo_launchdef generate_launch_description():
moveit_config = MoveItConfigsBuilder("robotarm", package_name="robotarm_moveit2").to_moveit_configs()
return generate_demo_launch(moveit_config)
并没有您提到的可能有错误的地方,但是launch的时候终端输出跟您的一样,想请问一下您是如何解决的呢 -
@yuanhaohh6 按照这个方法解决的
 。但是运行之后又出现了新的错误
。但是运行之后又出现了新的错误 不知道有没有这个错误的决绝办法。
不知道有没有这个错误的决绝办法。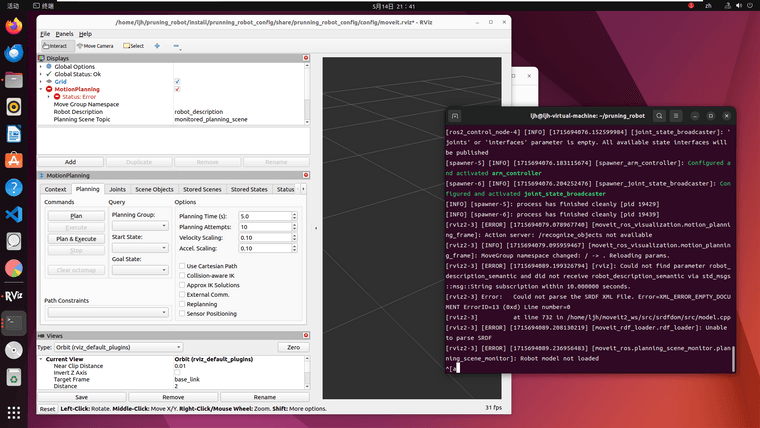
-
我根据您的方法改了那个代码,后续也是在rviz中出现了错误,您这个后面解决了麻
-
是用的humble吗,我之前也有这个问题,只要把编译的所有install,log,build文件夹都删掉再重新编译应该就可以
-
@3286029015 只用把工作空间的src、log、install全删掉然后编译就行了吗?我试了,不起作用。moveit_setup_assistant生成的包内容不会变呀
-
这个是因为config文件夹下的jointslimit.yaml(不确定是不是这么个名称,但差不多就是关节限制的一个文件)里面有个速度限制参数要改成浮点数,原本是1改为1.0就好了。
应该是这样。