使用easy_handeye手眼标定包无法出现rqt界面并且有报错
-
我的配置是ubuntu20.04+noetic,在虚拟环境python=2.7.18下进行手眼标定,当我运行标定的launch文件时,仅仅只出现
两个rviz界面如下图所示
无法出现正常的rqt界面如下图所示
并且有报错
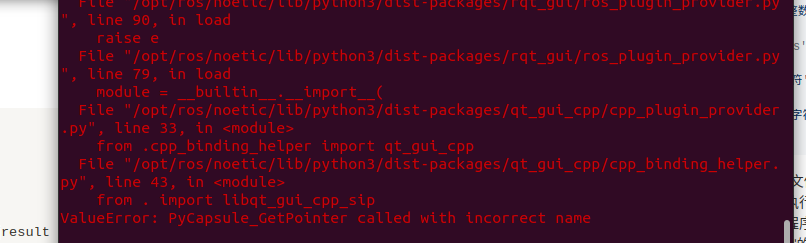
File "/opt/ros/noetic/lib/python3/dist-packages/qt_gui_cpp/cpp_binding_helper.py", line 43, in <module> from . import libqt_gui_cpp_sip ValueError: PyCapsule_GetPointer called with incorrect name我查阅了相关资料,应该是pyqt的版本问题,但是我重新安装的pyqt多个版本,依然有同样的错误,请问该如何解决,感谢指点
-
您遇到的问题似乎与Python环境或PyQt版本不兼容有关。
easy_handeye是一个ROS包,用于手眼标定,它依赖于Qt GUI工具来显示rqt界面。首先,请确保您使用的是与ROS Noetic兼容的Python版本。ROS Noetic是为Python 3设计的,而不是Python 2。因此,您不应该在Python 2.7.18环境中运行ROS Noetic。请尝试在Python 3环境中安装和运行
easy_handeye。这里有一些步骤可以尝试解决问题:
-
切换到Python 3环境:
请确保您的虚拟环境使用Python 3。您可以创建一个新的虚拟环境,并安装ROS Noetic所需的Python 3版本。 -
更新和安装依赖:
确保您已经安装了所有必要的依赖项,并且它们都是最新的。您可以使用ROS的包管理器apt来安装依赖项。 -
检查PyQt版本:
easy_handeye和ROS Noetic可能依赖于特定版本的PyQt。确保您安装的PyQt版本与ROS Noetic兼容。您可能需要卸载当前安装的PyQt版本,并安装一个与ROS Noetic兼容的版本。 -
清理构建:
如果您之前尝试过构建easy_handeye,请尝试清理构建目录并重新构建。这可以通过删除devel和build目录,然后再次运行catkin_make或colcon build(取决于您使用的构建系统)来完成。 -
查看文档和论坛:
查看easy_handeye的官方文档或ROS论坛,看看是否有其他人遇到了类似的问题,并找到了解决方案。 -
寻求帮助:
如果上述步骤都无法解决问题,您可以在ROS论坛或easy_handeye的GitHub仓库中提问,寻求社区的帮助。在提问时,请提供尽可能多的信息,包括您的ROS版本、Python版本、已安装的依赖项以及您尝试过的解决方案。
最后,请注意,ROS Noetic和许多ROS包可能不再支持Python 2。因此,强烈建议您迁移到Python 3环境,并确保您的所有依赖项都与ROS Noetic兼容。
以上为生成回答,仅供参考~
-