rosdepc依赖已经安装但还是不能定位
-
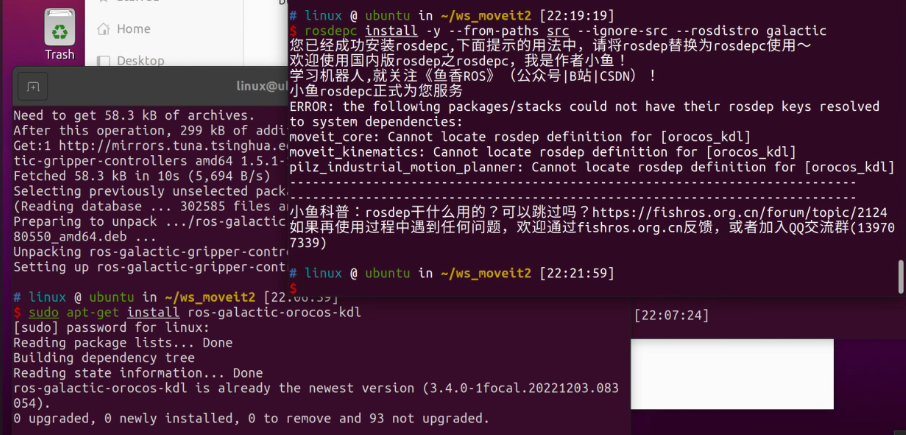
使用rosdepc install -y --from-paths src --ignore-src --rosdistro galactic 指令安装moveit2源码时出现依赖错误(如图右侧终端)。安装orocos-kdl时显示已安装(如图左侧终端)。想问一下这种情况该如何解决呢?
-
如果您在使用
rosdep安装依赖时遇到了即使依赖已经安装但还是无法定位的问题,以下是一些可能的解决步骤:-
确认
rosdep数据库是最新的:
首先确保您的rosdep数据库是最新的。您可以通过以下命令来更新它:sudo rosdep init rosdep update这将会更新
rosdep的源列表和依赖信息。 -
检查ROS_DISTRO环境变量:
确保您的ROS_DISTRO环境变量设置正确。您可以通过以下命令来查看和设置它:echo $ROS_DISTRO export ROS_DISTRO=galactic请确保
ROS_DISTRO与您正在使用的ROS发行版相匹配。 -
手动安装依赖:
如果rosdep无法找到某个特定的包,您可能需要手动安装它。根据您提供的截图,orocos-kdl可能是一个需要从源代码编译的包,或者它可能是一个非ROS包,因此rosdep无法直接处理。您可以尝试查找该包的安装指南,并根据指南手动安装。 -
检查包管理器的缓存:
如果您使用的是apt(Debian/Ubuntu)或yum(Fedora/CentOS)等包管理器,尝试清除它们的缓存并再次尝试安装:sudo apt update && sudo apt clean # 或者对于yum/dnf sudo yum clean all sudo dnf clean all -
检查源列表:
确保您的系统源列表中包含所有必要的ROS仓库。对于orocos-kdl,您可能需要添加额外的源来找到它。检查orocos-kdl的安装说明,看看是否有关于添加特定源的指导。 -
检查依赖的命名:
有时候,依赖的命名可能因发行版或平台而异。确保您查找的依赖名称与rosdep尝试查找的名称相匹配。 -
查看
rosdep日志:
如果上述步骤都无法解决问题,您可以查看rosdep的详细日志以获取更多信息。通过添加-vvv选项,您可以获取更详细的输出:rosdep install -y --from-paths src --ignore-src --rosdistro galactic -vvv这将显示
rosdep在尝试解析依赖时所做的一切,这可能会帮助您诊断问题。 -
考虑使用其他版本的
rosdep:
如果您使用的rosdep版本与您的ROS发行版不兼容,可能会出现问题。尝试安装与您的ROS发行版兼容的rosdep版本。 -
寻求社区帮助:
如果上述步骤都无法解决问题,您可以在ROS的官方论坛、问答网站或相关社区中寻求帮助。在那里,您可以找到其他ROS用户或开发者,他们可能遇到过类似的问题,并能提供解决方案。
请按照这些步骤逐一尝试,并检查每一步之后是否解决了问题。希望这些建议对您有所帮助!
以上为生成回答,仅供参考~
-