关于在ZYNQ处理器上colcon build的问题
-
在zynq处理器上移植的ros2系统编译错误
背景:我把ros2的humble版本放到了一个zynq7020的 板子上运行,我使用的是petalinux工具构建的系统,我配置了文件系统添加了我认为的所有基本工具,比如arm-xilinx-linux-gnueabi-gcc等,我把板子上电后手动发布 一个话题,在别的PC主机上能订阅,我用python创建 一个简单的包,发布简单的话题,别的PC段也能订阅,一切都很正常,然后我又尝试创建一个 C++的包,创建过程也没问题,然后在 执行colcon build的时候会报错。
我在PC端使用的时候会 把source /opt/ros/humble/setup.bash放到。bashrc中,因此我觉得应该对整个ros2做了初始化,然而,我在嵌入式处理器上没有类似的操作,不知道问题是否出在这里 ,整个工具包都在/usr/bin中和/usr/share
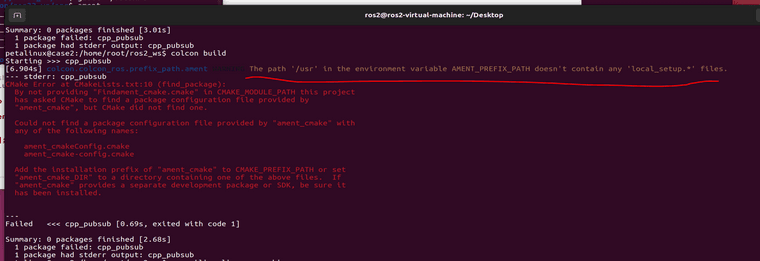
上图是错误信息截图
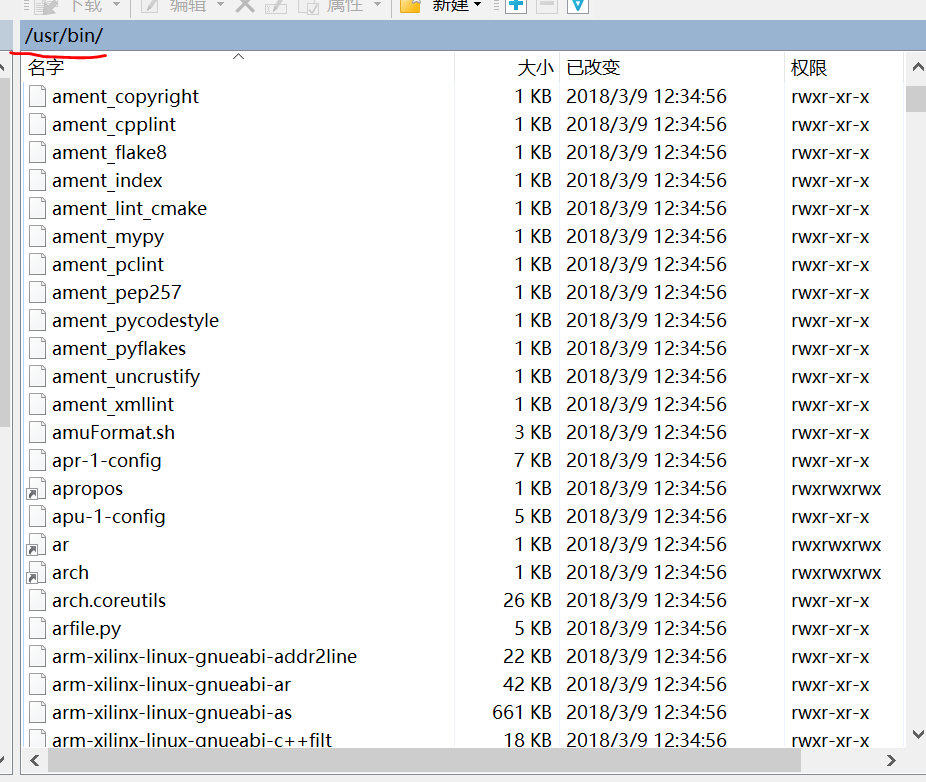
这个是板卡上工具的路径,双击Tab键是可以补全的,说明 在环境变量里
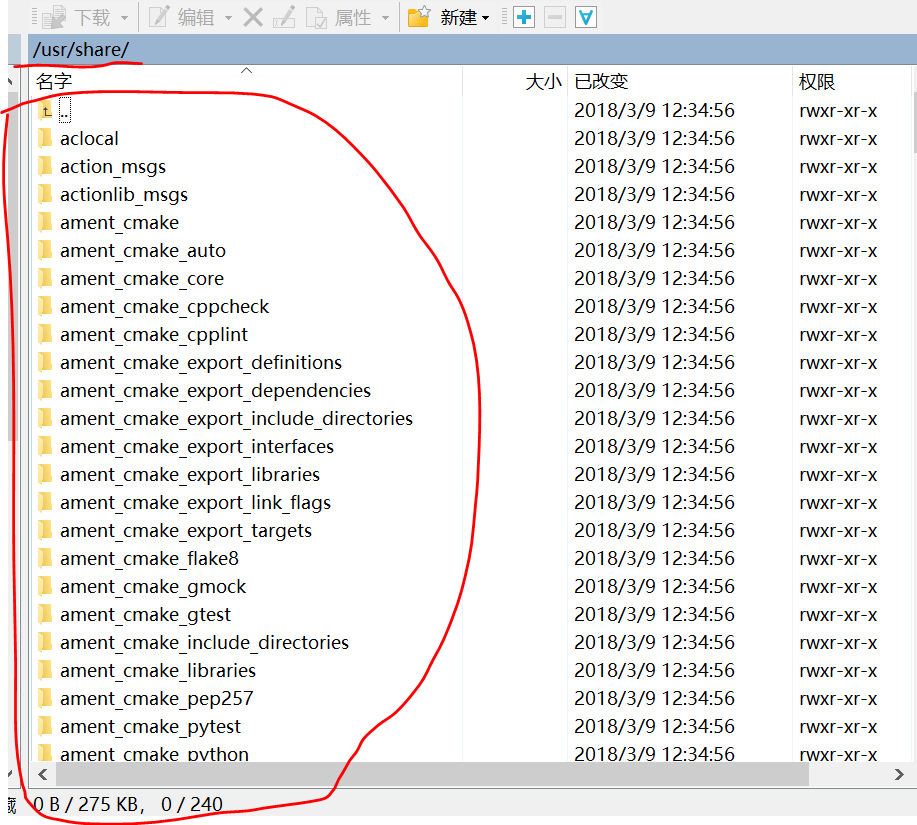
这个貌似一堆包的路径
所以我的问题就是colcon build报错因为啥?怎么 解决?
-
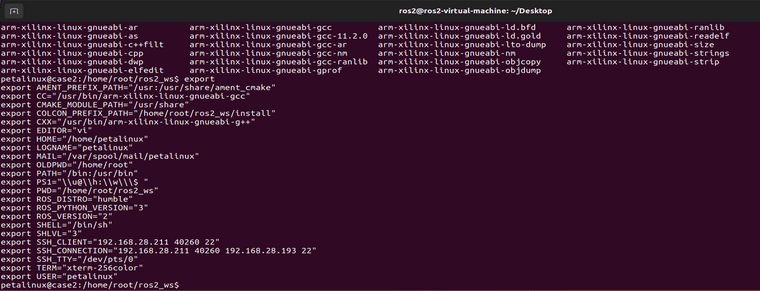 这些是导出的变量设置
这些是导出的变量设置