-
大家好,我是小鱼,今天在邮箱里看到了一封关于AutoWare 2024挑战赛的宣传邮件。Autoware Challenge 2024 是由 Autoware 基金会和来自日本的自动驾驶公司 TIER IV 主办的软件开发挑战赛,目的就是 TIER IV 公司想通过该比赛,解决当前公司中面临的技术问题。所以我们可以通过这个比赛的要求,来看看他们面临的无人驾驶落地问题有哪些,相信会有很多启发意义,值得一提的是,Autoware 也在考虑引入类似于 comma.ai 和 Tesla 的 FSD 的端到端(E2E)自动驾驶技术架构。
原文链接:https://autoware.org/autoware-challenge-2024/
宣传海报:
以下是逐页翻译的内容:
感知组件
[感知] 改进LiDAR点云过滤
挑战:
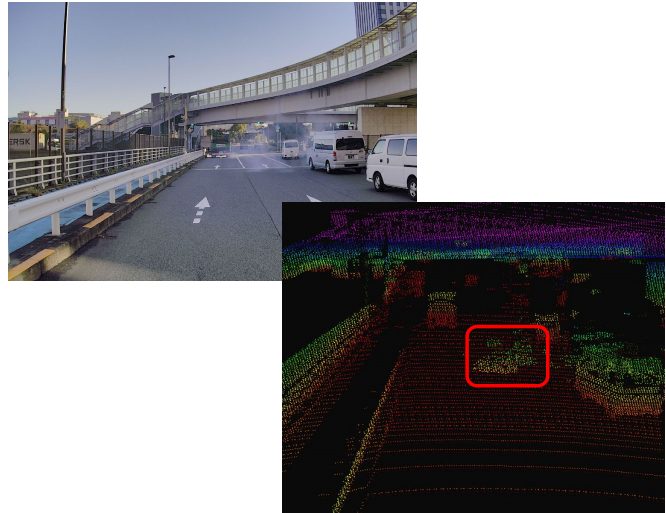
Autoware对用于物体识别的LiDAR点应用了各种过滤器。然而,有几个问题:- 雨、雾和灰尘引起的离群点在点云中作为噪声存在。
- 不需要避免的物体(如杂草或塑料袋)产生的点应被移除。
目标:
开发一种点云过滤器,有效去除对应于非威胁物体的点,同时保留需要避免的实心障碍物的点。[感知] 使用相机/LiDAR/雷达进行远距离物体检测

挑战:
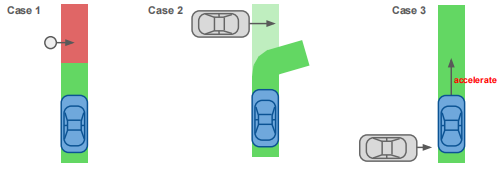
识别远距离物体(例如200米以外的物体)的需求很大。例如,在非保护的左转(或在日本为右转)时,能够从远距离检测到高速接近的车辆,直接影响这些操作的性能。然而,在像200米这样的距离上,LiDAR点变得稀疏,识别变得具有挑战性。目标:
确保在远距离(约200米)进行物体识别的充分性,以用于规划组件。本项目可以使用mAP以外的指标进行提案和评估。例如,Autoware使用Lanelet作为高清地图,因此输出类似于“在Lanelet ID xx中有一个速度约为yy的物体”也是可以接受的。[感知] 未知物体检测
挑战:
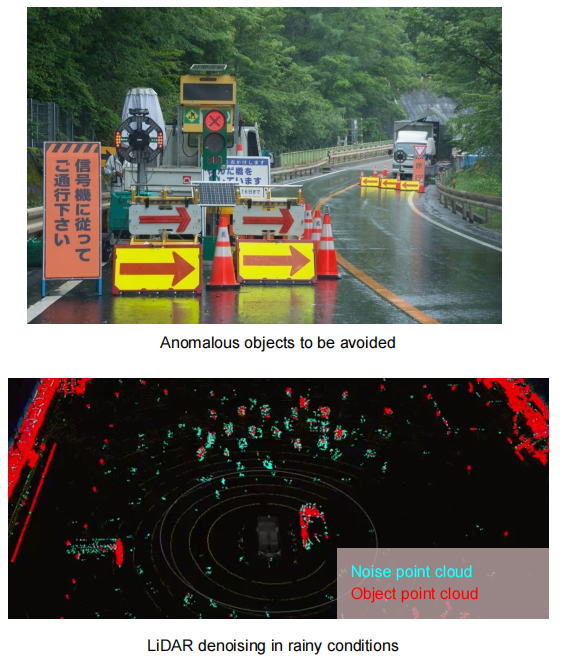
Autoware中的物体检测严重依赖于机器学习技术,这些技术目前难以识别未在训练数据中标记的物体。在公共道路上,管理系统未曾遇到过的意外物体(例如俯卧的人类、陌生的动物和纸板箱)至关重要。此外,还需要准确检测这些未知物体,并做出是否需要避免的适当决定。此外,在生成LiDAR噪声的条件下(如雨、雪或灰尘),区分噪声和实际物体也是必需的。目标:
-
未知物体检测:
- 检测并分类未知或未分类的物体,确定是否需要避免。
- 识别应避免的异常物体,包括可用最少LiDAR测量检测到的非常小的物体。
-
噪声物体和点云去除:
- 在困难环境中(如雨、尘、雾和雪)去除误报。
- 对点云或物体进行过滤,确保两种方法在不同环境中都易于调节。
[感知] 行人路径预测
挑战:
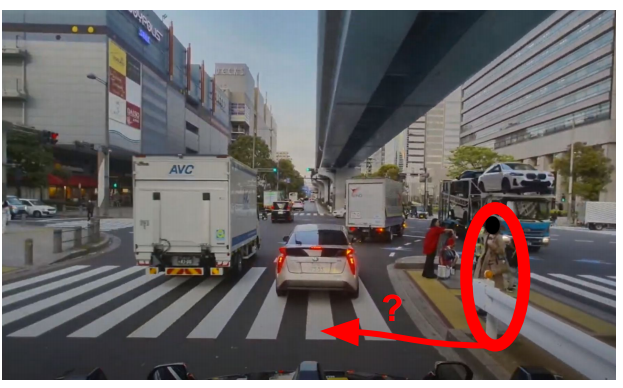
在人行横道、人行道和车道之间界限模糊的道路上,行人行为预测对于确保安全至关重要。当前Autoware中的行人行为预测由于几个原因是不足的,我们旨在改善短期和长期的行人行为预测。原因:
- 缺乏必要的判断信息:检测系统不包含行人的姿态和方向信息。
- 简单的预测模型:只使用了简单的控制逻辑,如时间上的EKF恒速模型外推,或假设行人朝人行横道上的特定点直走。
目标:
-
短期预测改进:
- 检测增强:有效利用相机和LiDAR信息检测行人的姿态和方向。
- 跟踪改进:基于附加信息更准确地预测行为意图(开始移动、直走、转弯)。
-
长期预测改进:
- 使用数据驱动或端到端方法预测行人未来15秒的轨迹。
- 提出可以集成到Autoware中的架构。
[感知] 转向灯感知架构

挑战:
转向灯识别是关键任务之一,不仅需要识别算法,还需要考虑如何在整个Autoware系统中利用它。利用转向灯识别的一种方法是预测其他车辆的轨迹。例如,如果前方车辆发出危险信号,预测轨迹应输出逐渐停止。这允许规划模块利用转向灯识别结果,而不增加感知模块向规划模块暴露的接口。目标:
提出一种新方案,通过考虑转向灯和危险灯预测周围车辆的路径。将根据以下标准评估所提议的解决方案:- 所提议的方法是否实际可用于Autoware(最好是已集成)。
- 所提议的方法是否输出有效的左转、右转信号和危险灯的预测路径(最好是通过与规划集成进行实验)。
- 虽然此次不以转向灯识别方法为目标,但如果进行转向灯识别集成实验以提高说服力,也会进行评估。
规划/控制组件
[规划] 紧急碰撞避免
挑战:
在自主驾驶中,确保安全是最关键的因素,尤其是在紧急情况下。这种情况之一涉及动态物体的意外行为,自动驾驶车辆面临碰撞风险。为了解决这些紧急情况,Autoware系统应包括一个利用方向盘和加速来避免或减轻碰撞的功能。目标:
- 设计和开发:创建一个功能,根据具体情况调整方向盘或加速/减速。
- 与现有组件隔离:确保该紧急功能尽可能独立于现有的感知、规划和控制组件。
- 故障树分析(FTA):使用FTA识别并明确哪些其他模块需要正常工作,以确保功能按预期执行。
[规划] 模仿人类驾驶的轨迹规划

挑战:
目前,Autoware使用基于规则、优化和采样的规划器生成轨迹。为了使这些计划的轨迹类似于人类驾驶,需要在各种边缘情况下进行广泛的处理,并在实际环境中进行细致的参数调整。目标:
- 创建模仿人类驾驶行为的轨迹规划器:
- 实现示例:
- 简单的监督学习
- 模仿学习
- 强化学习
- 实现示例:
[控制] 针对不同车辆重量的鲁棒控制算法

挑战:
大型车辆(如公共汽车或卡车)的重量因乘客人数或货物量而异。因此,必须相应地调整所需的执行器输出(例如,加速踏板的压下程度),以实现期望的加速度。目标:
创建一个控制模块,在操作过程中仍能有效地应对车辆重量的变化。所提功能可能包括:- 从控制误差中估计车辆重量
- 估计轮胎压扁的变化
- 在线修改控制算法中使用的控制参数
考虑因素:
- 误差区分:一个挑战是区分由于车辆组件转换器(从目标加速度到执行器输出)引起的误差和由于重量变化引起的误差。功能必须准确确定误差的来源。
- 重量稳定假设:为了精确估计,假设车辆在运动时重量保持不变。
- 验证:确保该功能在简单的规划模拟器中表现良好。
[控制] 高速控制

挑战:
Autoware中的大多数控制器目前仅考虑车辆运动学,忽略了如打滑等车辆动力学。这种忽视可能导致高速驾驶(80-120 km/h)期间的显著跟踪误差。此外,没有现有的模拟器可以测试车辆动力学。目标:
- 开发高级控制器:创建能够处理高速驾驶的纵向和横向控制器,并明确这些控制器的校准和参数调整过程。
- 开发车辆动力学模拟器:构建一个能准确再现车辆动力学(包括打滑)的模拟器。
- 确保低跟踪误差:验证控制器在模拟器中保持低跟踪误差。
定位组件
[定位] 提高动态环境中地图不一致区域的定位精度

挑战:
地图数据可能并不总是与现实环境对齐,特别是在如停车场或工厂等随时间变化的动态区域。虽然提供了点云数据(PCD)和LL2数据,但其可靠性可能不一致。目标是确保与现有地图数据对齐,同时在数据缺失的区域准确估计位置。目标:
提出一种在数据缺失或不可靠的区域准确估计位置的定位系统。假设:
规划器可以使用PCD和LL2数据。[定位] 定位误差的估计
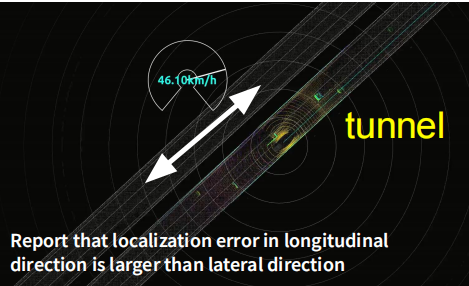
挑战:
Autoware目前使用点云匹配方法进行姿态定位。然而,这种方法在某些情况下可能变得不可靠。例如:- 示例场景1:当车辆在隧道中行驶时,横向方向的定位可能准确,但纵向方向可能不准确。
- 示例场景2:当车辆在空旷区域行驶时,z轴、横滚和俯仰方向的定位可能准确,但x/y轴或偏航方向可能不
准确。
目标:
估计点云匹配方法定位误差的可靠性,并明确错误位置。其他挑战
挑战:
Autoware 是一个全面的自动驾驶软件,能够适应各种传感器配置和车辆,具有多种接口。由于有许多贡献者参与,这些接口经常发生变化。为了继续推动使用 Autoware 进行自动驾驶开发,必须有效地跟踪这些变化。
提出管理 Autoware 中各种接口的工具或框架,例如 ROS 主题和服务名称、ROS 参数名称以及地图规范的变化。潜在的解决方案可能包括:
- 检测接口变化并自动生成发布说明的机制。
- 自动管理接口变化的开发框架。
其他:
- 管理 Autoware 的 API 和接口变化。
- 发布说明的示例,汇总接口变化。
[模拟器] 改进 AWSIM
AWSIM 是 Autoware 开发的默认模拟器,但存在一些影响用户体验的问题,包括:
- 运行模拟所需的高计算能力。
- 定制车辆模型和环境模型的用户界面(UI)较差。
- 非玩家控制(NPC)车辆/行人在环境中的不现实行为。
- 缺乏对恶劣天气条件的模拟,包括雨水引起的传感器噪声和车辆溅起的水花。
目标:
提出改进 AWSIM 用户友好性的想法,解决上述问题。[其他] 高效测试 Autoware 的参数空间
挑战:
Autoware 具有广泛的参数,有时在使用某些组合时会导致意外行为。为了确保稳健性,必须对各种参数组合进行广泛测试。目标:
提出高效测试 Autoware 参数空间的框架。建议应包括成对测试和因子设计等技术,以提高测试效率。- 测试框架示例
[其他] 乘用车的自动驾驶
挑战:
当前版本的 Autoware 主要为商业车辆(如班车和机器人出租车)设计,旨在完全自动驾驶于指定区域内。我们希望将 Autoware 的使用扩展到乘用车。目标:
我们期望参与者提出将 Autoware 集成到乘用车中的想法。考虑以下几点:- 引入端到端(E2E)自动驾驶架构:支持更大的操作设计域,类似于 comma.ai 和 Tesla 的 FSD 技术。
- 减少对高清地图的依赖:实现不需要地理围栏的自动驾驶。
- 设计新的传感器设置和电子电气(E/E)架构:开发适用于乘用车的可行且经济的解决方案。
注意:
您的提案不需要符合当前的 Autoware 规范。 -
从AutoWare Challenge 2024的概述中,我们可以看到无人驾驶领域所面临的广泛挑战和AutoWare软件框架试图解决的具体问题。这些挑战涵盖了从感知、规划、控制到模拟器改进和乘用车自动驾驶扩展等多个方面。
感知挑战
- LiDAR点云过滤:需要开发一种能够有效去除噪声和非威胁物体点,同时保留关键障碍物信息的点云过滤器。
- 远距离物体检测:要求确保在远距离(如200米)下物体识别的准确性,这对于安全驾驶至关重要。
- 未知物体检测:能够检测并分类未在训练数据中标记的物体,这对于在真实世界环境中运行至关重要。
- 行人路径预测:需要改进短期和长期的行人行为预测,特别是在边界模糊的道路环境中。
- 转向灯感知:开发一种架构,能够利用转向灯和危险灯信息来预测周围车辆的轨迹。
规划与控制挑战
- 紧急碰撞避免:设计一种能够利用方向盘和加速来避免或减轻碰撞的功能。
- 模仿人类驾驶:开发一种能够生成类似人类驾驶轨迹的规划器。
- 鲁棒控制算法:创建一种能够适应不同车辆重量的控制算法,特别是在大型车辆中。
- 高速控制:开发能够处理高速驾驶中车辆动力学的高级控制器。
定位挑战
- 动态环境中定位:在数据缺失或不可靠的区域提高定位精度。
- 定位误差估计:估计并明确点云匹配方法中的定位误差。
其他挑战
- 接口管理:开发一种工具或框架来有效管理Autoware中各种接口的变化。
- 模拟器改进:提高Autoware的默认模拟器AWSIM的用户友好性和模拟准确性。
- 参数空间测试:提出一个框架来高效测试Autoware的参数空间。
- 乘用车自动驾驶:将Autoware扩展到乘用车领域,并探索端到端自动驾驶架构。
总结
AutoWare Challenge 2024提供了一个绝佳的平台,让开发人员能够针对无人驾驶领域的关键挑战进行深入研究,并推动自动驾驶技术的进一步发展。从感知到控制,从模拟器到乘用车应用,这些挑战需要跨学科的知识和团队合作来解决。通过参与这样的挑战赛,我们可以更深入地了解无人驾驶技术的现状和未来发展的方向。
以上为生成回答,仅供参考~
-
 小 小鱼 从 中的 社区运营 移动了该主题
小 小鱼 从 中的 社区运营 移动了该主题