ros2编译问题,请大佬指教一下
-
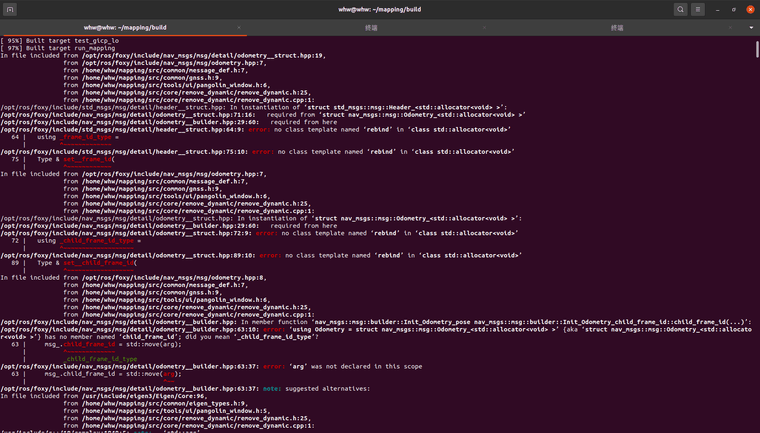
我在ros项目中引入了一个基于c++20的第三方库,但是只要同时引入这个库的头文件和任何ros2 foxy中的头文件,编译就会报错,求解答,谢谢
-
当你在ROS 2 Foxy项目中引入一个基于C++20的第三方库,并且遇到与ROS 2头文件同时引入时的编译错误,这通常是由于以下几个原因造成的:
-
编译器标准不一致:ROS 2 Foxy默认可能不支持C++20的全部特性,或者你的编译器设置没有正确指定使用C++20。你需要确保编译器和链接器都被配置为使用C++20标准。
-
头文件冲突:有时候,第三方库的头文件可能与ROS 2的头文件存在冲突,这可能是由于宏定义、类型定义或其他原因。
-
依赖库版本不兼容:第三方库可能依赖特定版本的库,而这些版本可能与ROS 2中使用的版本不兼容。
以下是一些解决此问题的建议步骤:
1. 检查编译器设置
确保你的CMakeLists.txt或package.xml文件中设置了正确的C++标准。例如,在CMakeLists.txt中,你可以添加:
set(CMAKE_CXX_STANDARD 20) set(CMAKE_CXX_STANDARD_REQUIRED ON)2. 检查依赖和链接
确保所有依赖的库都已正确安装,并且版本兼容。你可以使用
ldd命令来检查动态链接库。3. 逐步引入头文件
尝试只引入ROS 2的头文件,然后单独编译,看是否有错误。接着,尝试只引入第三方库的头文件,再次单独编译。然后,逐步将两者结合起来,每次引入一点,观察错误是如何出现的。
4. 清理和重建
在修改CMakeLists.txt或其他配置文件后,确保清理并重新构建你的工作空间。你可以使用
colcon build --packages-select your_package_name --symlink-install --merge-install命令来构建你的包。5. 查看错误消息
仔细阅读编译器和链接器的错误消息。这些消息通常会给出关于问题的详细信息,如哪个头文件或哪个函数导致了问题。
6. 搜索或报告问题
如果问题仍然存在,并且你认为它可能是由于ROS 2或第三方库中的错误引起的,你可以搜索相关的论坛、GitHub问题或邮件列表,看看是否有人遇到了类似的问题。如果没有找到解决方案,你可以考虑在适当的平台上报告这个问题。
7. 使用ROS 2的更新版本
如果你正在使用ROS 2 Foxy,并且这个问题是一个已知的问题,那么在新版本的ROS 2中可能已经得到了修复。考虑升级到ROS 2的更新版本,如Galactic或Rolling。但是,请注意,新版本可能会引入新的依赖和要求。
以上为生成回答,仅供参考~
-