ros2机器人在执行导航命令后,报错
-
标题:[ros2机器人在执行导航命令后,报错]
背景(可选):
[实现网页点击按钮,机器人导航至指定地点]
问题描述:
我在执行命令后:
export DISPLAY=:0;cd /home/it/bn_ws/;source install/setup.bash;ros2 launch robot_navigation2 navigation2.launch.py slam:=True在网页点击按钮实现机器人移动至某个点位,开始一次两次是能实现导航至指定点,去往第三个第四个就会出现卡死的情况,用rviz导航不会出现卡死。
具体细节和上下文:
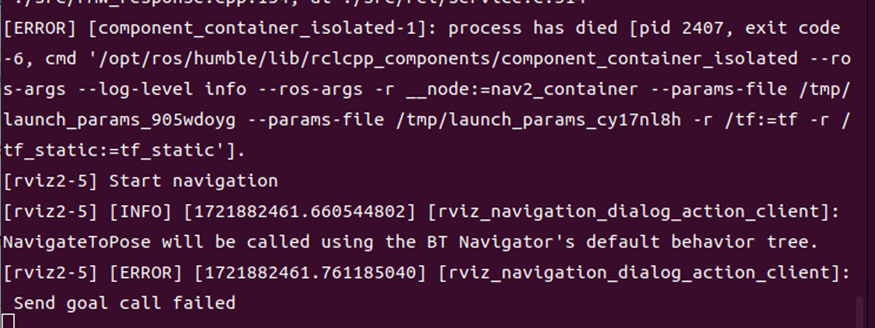
报错信息: component_container_isolated-1] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError' [component_container_isolated-1] what(): client will not receive response, at ./src/rmw_response.cpp:154, at ./src/rcl/service.c:314 [ERROR] [component_container_isolated-1]: process has died [pid 2847, exit code -6, cmd '/opt/ros/humble/lib/rclcpp_components/component_container_isolated --ros-args --log-level info --ros-args -r __node:=nav2_container --params-file /tmp/launch_params_lm2rkw4u --params-file /tmp/launch_params_sw10ocji -r /tf:=tf -r /tf_static:=tf_static']. 图片地址)
图片地址)
 图片地址)
图片地址)- [出现上面内容就会卡死,rviz动不了,在rviz标导航点位无法移动,但是网页控制前后左右还是可以
试过一些解决方法;
]
尝试过的解决方法:
方法一:
Message Filter dropping message: frame 'laser' at time 1721884570.330 for reason 'discarding message because the queue is full'链接文本
这里两个都试过了,不管是改为true还是false,依然会存在卡死的现象。
 图片地址)
图片地址)方法二:
有人说跟这个可能有关系(注释的是网上的)
 图片地址)
图片地址)
经过测试也是不太行 - [出现上面内容就会卡死,rviz动不了,在rviz标导航点位无法移动,但是网页控制前后左右还是可以
-
针对您描述的ROS 2机器人在执行导航任务时出现的卡死和错误,这里有几个可能的原因和解决方案供您尝试:
1. 检查并优化消息队列
从错误信息来看,可能存在消息队列满的问题。这通常是因为节点处理消息的速度跟不上消息生成的速度。
- 增加队列大小:在相关的订阅者节点中,尝试增加队列大小(
queue_size)。这可以在ROS 2的订阅者设置中进行调整。 - 优化处理速度:检查处理消息的节点是否可以进行优化,比如减少不必要的计算或调用更高效的算法。
2. 检查并优化TF变换
导航严重依赖于TF变换来同步不同坐标系下的数据。
- 确保TF发布稳定:检查是否有TF发布器偶尔丢失数据或发布频率不稳定。
- 查看TF延迟:使用
ros2 tf_echo命令来检查特定变换的延迟和稳定性。
3. 检查并优化网络通信
如果网络通信不稳定或带宽不足,也可能导致消息丢失和响应延迟。
- 检查网络设置:确保网络连接稳定,带宽足够。
- 使用Wireshark等工具:分析网络数据包,查看是否有数据包丢失或延迟。
4. 检查并调整ROS 2的配置
ROS 2的配置也可能影响性能。
- 调整日志级别:减少不必要的日志输出,将日志级别设置为
WARN或ERROR。 - 检查资源使用情况:使用
top、htop或ros2 topic echo等命令来检查CPU和内存使用情况,以及特定话题的消息频率。
5. 重启和清理
有时简单的重启ROS 2节点或整个系统可以解决一些暂时性的问题。
- 重启ROS 2节点:使用
ros2 node kill命令杀死有问题的节点,然后重新启动它们。 - 重启系统:如果问题持续存在,尝试重启整个系统。
6. 查看和调试具体服务
由于错误涉及服务调用,您可能需要更详细地查看服务调用和处理过程。
- 检查服务实现:确保服务实现正确,没有死循环或无限等待。
- 使用
ros2 service list和ros2 service call:查看可用服务和尝试手动调用服务,以查看是否有响应。
7. 更新和兼容性检查
确保您的ROS 2版本和所有依赖库都是最新的,并且彼此兼容。
- 更新ROS 2:使用
sudo apt update && sudo apt upgrade更新您的ROS 2安装。 - 检查依赖库的兼容性:确保所有第三方库都与您的ROS 2版本兼容。
通过上述步骤,您应该能够诊断并解决导致机器人卡死和错误的问题。如果问题仍然存在,您可能需要更深入地分析代码或寻求社区的帮助。
以上为生成回答,仅供参考~
- 增加队列大小:在相关的订阅者节点中,尝试增加队列大小(
-
-
@小鱼 那报的错是什么意思鱼哥有见过吗,component_container_isolated --ros-args --log-level info --ros-args -r __node:=nav2_container --params-file ,还是说这个就是下发模块导致的