按照动手学ROS2foxy第六章6.5.3.2下列软件包有未满足的依赖关系:
-
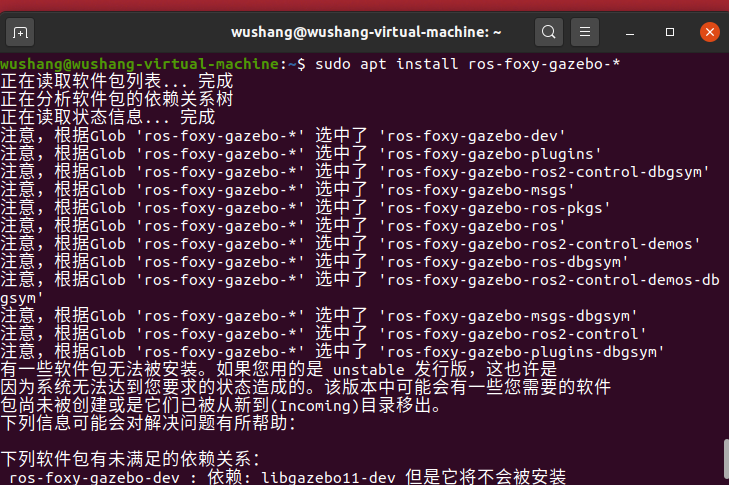
 按照3.2当中的做法操作,输入命令后出现了如下问题该如何解决
按照3.2当中的做法操作,输入命令后出现了如下问题该如何解决

-
在解决ROS 2软件包依赖关系问题时,首先需要确保你的ROS 2环境已正确安装,并且你的系统源列表(repositories)是最新的。根据你所描述的问题,你正在尝试安装或更新某个软件包,但遇到了未满足的依赖关系。这里有几个步骤可以帮助你解决这个问题:
1. 更新ROS 2源
确保你的ROS 2软件源是最新的。这通常涉及到运行ROS 2的
update_sources.bash脚本,该脚本会更新你的apt源以包含最新的ROS 2包。sudo apt update sudo apt install python3-rosdep sudo rosdep init rosdep update sudo ./install/setup-ros2-foxy.bash # 或者类似的脚本来设置你的ROS 2环境 echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc source ~/.bashrc2. 安装缺失的依赖
如果系统告诉你缺少某个依赖,尝试使用
apt命令直接安装这些依赖。例如,如果系统提示缺少libfoo-dev,则运行:sudo apt install libfoo-dev3. 检查ROS 2包索引
使用
apt search或apt-cache search来检查你需要的包是否存在于你的ROS 2源中。例如:apt search your-package-name如果包不存在,你可能需要添加额外的ROS 2源或使用其他方式获取该包。
4. 清理并更新
有时,清理旧的包数据和缓存可以解决依赖问题:
sudo apt clean sudo apt autoclean sudo apt autoremove sudo apt update sudo apt upgrade5. 检查
rosdep使用
rosdep检查并安装所有ROS 2包的依赖。首先,确保你的rosdep数据库是最新的(如上所述),然后尝试为你的包安装依赖:rosdep install --from-paths src --ignore-src -r -y这里
--from-paths src假设你的工作空间在src目录下,-r表示递归安装所有依赖,-y表示自动回答yes。6. 编译工作空间
如果你是在一个工作空间中工作,并且添加了新的包,确保你已经编译了整个工作空间:
colcon build --packages-select your-package-name或者简单地编译整个工作空间:
colcon build7. 查看错误和日志
详细查看构建过程中的错误信息,看看是否有更具体的提示。有时,错误信息会指向缺失的依赖或配置问题。
8. 搜索和社区帮助
如果上述步骤都不能解决问题,尝试在ROS 2的官方论坛、GitHub问题跟踪器或Stack Overflow等社区搜索类似的问题。
希望这些步骤能帮助你解决ROS 2软件包依赖关系的问题!如果问题仍然存在,请提供更具体的错误信息,以便进一步分析。
以上为生成回答,仅供参考~
-
-
在ROS 2(如Foxy版本)的安装和配置过程中,
setup-ros2-foxy.bash脚本通常用于设置环境变量,以便系统能够找到ROS 2的安装位置和相关工具。这个脚本通常由ROS 2的安装过程自动生成,并放置在安装目录的某个子目录下,比如install或opt/ros/<distro>下的某个位置。然而,你提到的命令
sudo ./install/setup-ros2-foxy.bash看起来像是直接从根目录尝试执行这个脚本,这通常不是正确的做法,原因有几个:- 路径可能不正确:
./install/setup-ros2-foxy.bash假设你当前的工作目录是ROS 2安装的顶级目录,这通常不是用户的工作目录。 - 使用sudo:通常不需要使用
sudo来运行这个脚本,除非ROS 2被安装到了需要sudo权限的目录下(这很少见)。
正确的做法
-
找到脚本的确切位置:
首先,你需要找到setup-ros2-foxy.bash脚本的确切位置。这通常位于ROS 2安装目录的某个子目录中。如果你不确定安装在哪里,可以使用find命令来搜索:find / -name setup-ros2-foxy.bash 2>/dev/null注意:这个命令会搜索整个系统,可能需要一些时间。如果你知道ROS 2大概安装在哪里(比如
/opt/ros/foxy),可以限制搜索范围。 -
执行脚本:
一旦你找到了脚本的确切位置,就可以直接使用它的完整路径来执行它,而不需要使用sudo(除非绝对必要):source /path/to/your/ros2/install/setup-ros2-foxy.bash注意这里使用了
source命令而不是直接执行脚本。source命令会在当前shell环境中执行脚本,这样设置的环境变量就会对当前shell会话有效。 -
验证安装:
执行完脚本后,你可以通过运行ros2 --version来验证ROS 2是否已正确安装并配置。
总结
确保你找到了
setup-ros2-foxy.bash脚本的正确位置,并使用source命令(而不是sudo)来执行它。这将帮助你正确设置ROS 2的环境变量,从而能够使用ROS 2的命令行工具和库。
以上为生成回答,仅供参考~
- 路径可能不正确:
-
我在安装gazebo的时候,也遇到了类似的问题,还没有解决。