服务失效
-
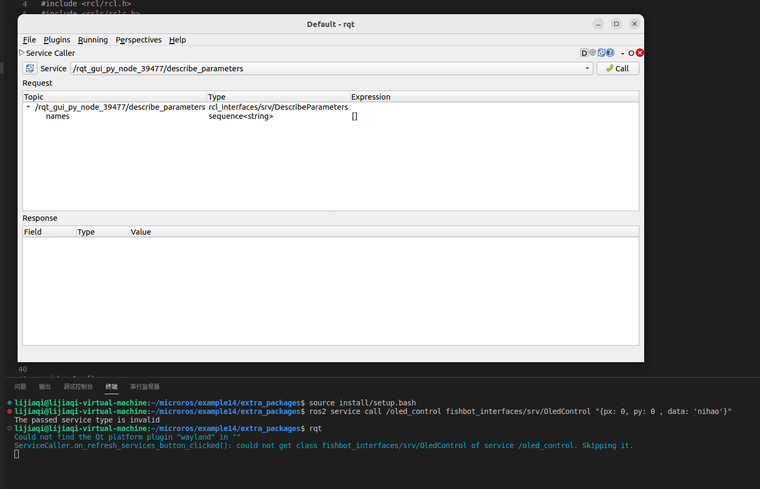
如图,在通过服务控制fishbot的oled的时候,代码成功编译并且下载,采用ros2 service
list也成功显示相关服务,但是直接通过命令行和rqt通过服务发布消息均失败 -
当你在使用ROS 2时遇到服务(service)调用失败的问题,这通常涉及到几个可能的方面,包括服务实现、服务发现、消息类型匹配以及网络或配置问题。以下是一些排查和解决此问题的步骤:
1. 确认服务名称和类型
首先,确保你调用的服务名称和类型完全正确。这包括服务名和消息类型(请求和响应)。你可以通过检查你的服务实现代码和客户端代码来确认这一点。
2. 检查服务实现
- 确保服务节点已经启动并且没有崩溃。
- 查看服务节点的日志输出,看是否有错误或异常信息。
- 确认服务回调函数已正确实现并可以处理传入的请求。
3. 使用
ros2 service list和ros2 service info- 使用
ros2 service list来确认服务已经注册在你的ROS 2网络中。 - 使用
ros2 service info /your_service_name来查看服务的详细信息,包括服务所在的节点和消息类型。
4. 检查网络问题
- 确保服务节点和客户端节点在同一个网络中,并且没有防火墙或网络策略阻止它们之间的通信。
- 如果你的ROS 2网络跨越多台机器,确保ROS 2的多机设置(如DNS解析、环境变量等)已正确配置。
5. 尝试手动调用服务
使用
ros2 service call /your_service_name your_srv_type "{...}"命令来手动调用服务,并检查响应。你可以将请求体替换为实际的数据结构。6. 检查ROS 2版本和依赖
- 确保你使用的ROS 2版本与你的依赖库和代码兼容。
- 如果可能,尝试在一个干净的ROS 2环境中重新构建你的项目。
7. 使用rqt进行调试
- 如果在rqt中调用服务失败,尝试在命令行中直接调用服务以排除rqt作为问题来源的可能性。
- 检查rqt的日志或输出窗口,看是否有错误或警告信息。
8. 查看权限问题
- 确保运行ROS 2节点和服务的用户具有足够的权限来访问网络和文件系统。
9. 示例代码检查
如果可能,尝试使用一个简单的服务示例(如ROS 2提供的示例)来验证你的系统环境是否有问题。
10. 搜索和询问社区
- 搜索ROS 2社区论坛、GitHub问题跟踪器或Stack Overflow,看看是否有人遇到过类似的问题。
- 如果问题依然存在,考虑在ROS 2的社区中提问,提供足够的细节以便他人帮助你。
通过以上步骤,你应该能够诊断并解决服务调用失败的问题。如果问题仍然存在,可能需要更深入地检查你的系统配置或寻求专业的帮助。
以上为生成回答,仅供参考~