ros2 humble版本,采用slam_toolbox 进行导航定位,出现导航到某一处位置时候地图会乱
-
标题:ros2 humble版本,采用slam_toolbox 进行导航定位,出现导航到某一处位置时候地图会乱,直接炸开的类型,并不是单纯的地图偏移。
背景(可选):采用slam_toolbox 替换amcl进行导航定位,为了实现更加稳定的定位以及导航时地图不偏移,导致导航过程失败。
问题描述:前部分导航,都很顺利,只要导航到某一部分的时候,地图就会“炸开”,目前不知道什么原因引起的,地图图片如下:
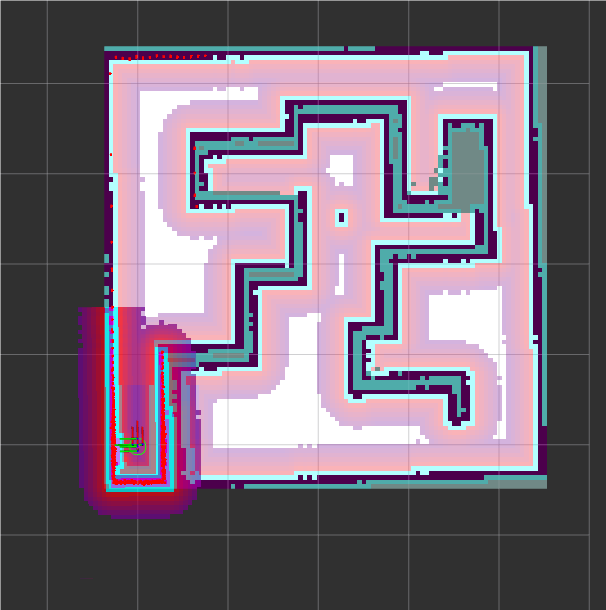
前面部分导航都很好只要到了这一部分,就会出现问题
出现问题的部分如下:
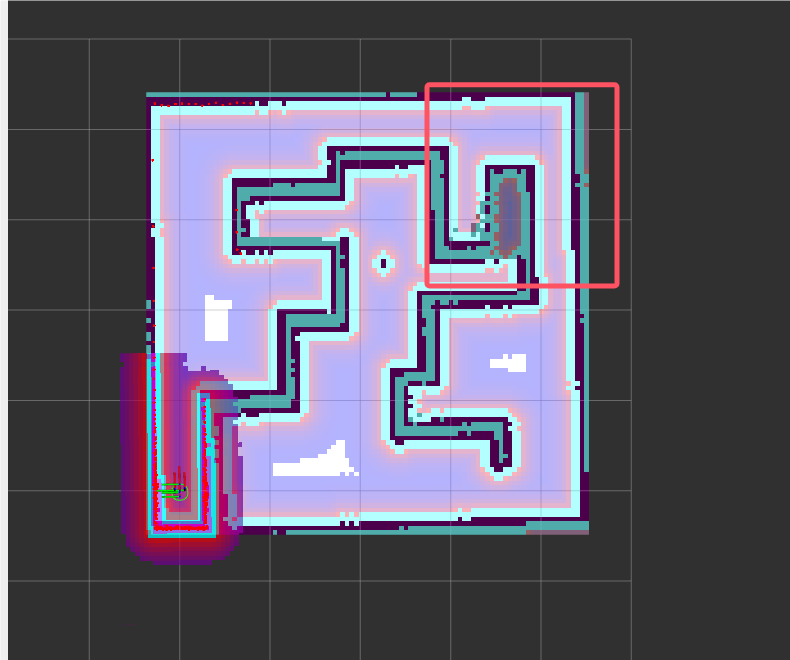
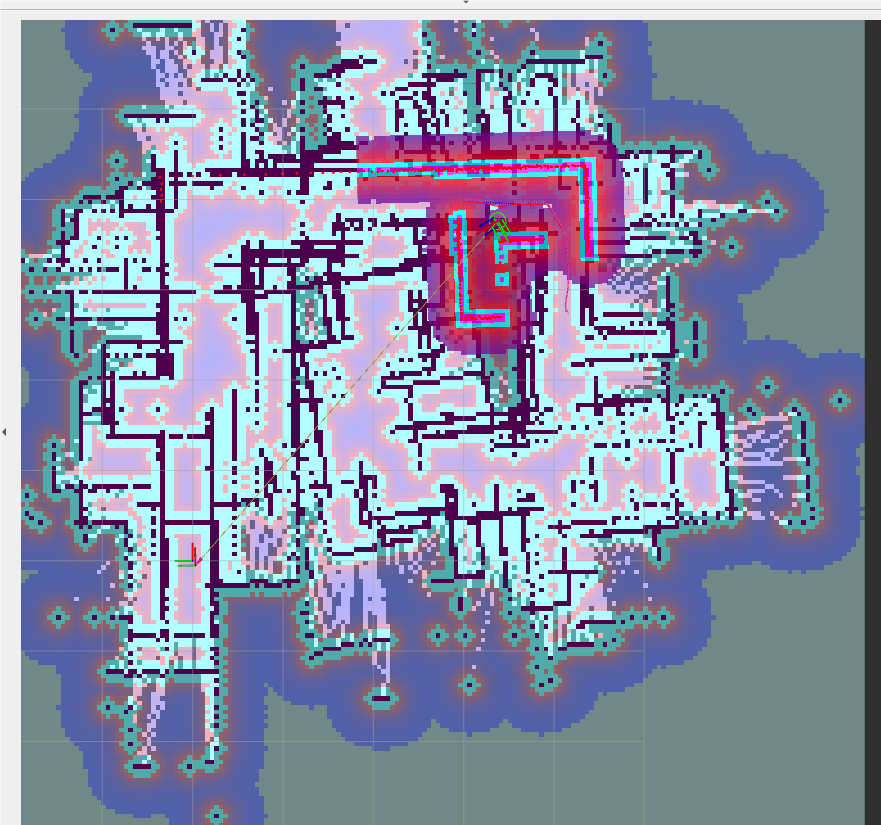
问题故障如下图:
到该部分终端出现报错情况如下:
[component_container_isolated-1] [ERROR] [1724307285.907588056] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown result response, ignoring... [component_container_isolated-1] [ERROR] [1724307285.925845834] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown goal response, ignoring... [localization_slam_toolbox_node-4] W0822 14:14:46.426656 4452 preprocessor.cc:62] Specified options.num_threads: 50 exceeds maximum available from the threading model Ceres was compiled with: 2. Bounding to maximum number available.完整终端:
[component_container_isolated-1] [WARN] [1724307286.908843602] [local_costmap.local_costmap]: Sensor origin at (3.97, -2.78 -0.00) is out of map bounds (2.50, -4.25, 0.00) to (5.47, -1.27, 0.78). The costmap cannot raytrace for it. [component_container_isolated-1] [ERROR] [1724307287.086988075] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown result response, ignoring... [component_container_isolated-1] [WARN] [1724307287.092854175] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [ERROR] [1724307287.123760977] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown goal response, ignoring... [component_container_isolated-1] [INFO] [1724307287.136044760] [controller_server]: Passing new path to controller. [component_container_isolated-1] [WARN] [1724307287.207703405] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307287.217314417] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307287.221412562] [amcl]: AMCL cannot publish a pose or update the transform. Please set the initial pose... [component_container_isolated-1] [WARN] [1724307287.610525548] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307287.657328986] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307287.702827668] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! ne]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307287.702827668] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [INFO] [1724307287.733120878] [amcl]: Received a 217 X 210 map @ 0.050 m/pix [component_container_isolated-1] [INFO] [1724307287.789936056] [amcl]: createLaserObject [component_container_isolated-1] [WARN] [1724307287.822017774] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [planner_server-2] [INFO] [1724307287.860205830] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 217 X 210 at 0.050000 m/pix [rviz2-3] [INFO] [1724307287.904209150] [rviz2]: Trying to create a map of size 217 x 210 using 1 swatches [component_container_isolated-1] [WARN] [1724307288.002069562] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307288.103269495] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [ERROR] [1724307288.143548020] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown result response, ignoring... [rviz2-3] [INFO] [1724307287.904209150] [rviz2]: Trying to create a map of size 217 x 210 using 1 swatches [component_container_isolated-1] [WARN] [1724307288.002069562] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307288.103269495] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [ERROR] [1724307288.143548020] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown result response, ignoring... [planner_server-2] [WARN] [1724307288.146537402] [planner_server]: GridBased: failed to create plan, no valid path found. [planner_server-2] [WARN] [1724307288.147374266] [planner_server]: Planning algorithm GridBased failed to generate a valid path to (2.77, -4.15) [planner_server-2] [WARN] [1724307288.147420845] [planner_server]: [compute_path_to_pose] [ActionServer] Aborting handle. [component_container_isolated-1] [ERROR] [1724307288.162093732] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown goal response, ignoring... [component_container_isolated-1] [INFO] [1724307288.186396412] [controller_server]: Passing new path to controller. [component_container_isolated-1] [WARN] [1724307288.251799468] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [INFO] [1724307288.254396977] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 217 X 210 at 0.050000 m/pix [rviz2-3] [INFO] [1724307288.414445809] [rviz2]: Trying to create a map of size 217 x 210 using 1 swatches [component_container_isolated-1] [WARN] [1724307288.454270114] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [WARN] [1724307288.503808791] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [ERROR] [1724307289.217755150] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown goal response, ignoring... [component_container_isolated-1] [WARN] [1724307289.227601898] [BehaviorTreeEngine]: Behavior Tree tick rate 100.00 was exceeded! [component_container_isolated-1] [INFO] [1724307289.227947803] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [ERROR] [1724307289.229403189] [bt_navigator_navigate_to_pose_rclcpp_node.rclcpp_action]: unknown result response, ignoring... [planner_server-2] [INFO] [1724307289.232845313] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap [component_container_isolated-1] [WARN] [1724307289.235189luanch调用如下:
#!/usr/bin/python3 # Copyright (c) 2022, www.guyuehome.com # # Licensed under the Apache License, Version 2.0 (the "License"); # you may not use this file except in compliance with the License. # You may obtain a copy of the License at # # http://www.apache.org/licenses/LICENSE-2.0 # # Unless required by applicable law or agreed to in writing, software # distributed under the License is distributed on an "AS IS" BASIS, # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. # See the License for the specific language governing permissions and # limitations under the License. import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch.substitutions import LaunchConfiguration, PathJoinSubstitution, Command def generate_launch_description(): navigation2_dir = get_package_share_directory('originbot_navigation') nav2_bringup_dir = get_package_share_directory('nav2_bringup') navigation2_launch_dir = os.path.join(get_package_share_directory('rm_navigation')) log_level = LaunchConfiguration('log_level') use_respawn = LaunchConfiguration('use_respawn') use_sim_time = LaunchConfiguration('use_sim_time', default='true') world = LaunchConfiguration('world') map_yaml_path = LaunchConfiguration('map',default=os.path.join(navigation2_dir,'maps','map.yaml')) nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(navigation2_dir,'param','nav2_params.yaml')) slam_toolbox_map_dir = PathJoinSubstitution([navigation2_dir, 'maps', world]) slam_toolbox_localization_file_dir = os.path.join(navigation2_dir, 'param', 'mapper_params_localization.yaml') rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz') return LaunchDescription([ DeclareLaunchArgument('use_sim_time',default_value=use_sim_time,description='Use simulation (Gazebo) clock if true'), DeclareLaunchArgument('map',default_value=map_yaml_path,description='Full path to map file to load'), DeclareLaunchArgument('params_file',default_value=nav2_param_path,description='Full path to param file to load'), DeclareLaunchArgument( 'world', default_value='map', description='Select world (map file, pcd file, world file share the same name prefix as the this parameter)'), DeclareLaunchArgument( 'slam_params_file', default_value=os.path.join(get_package_share_directory("originbot_navigation"), 'param', 'mapper_params_localization.yaml'), description='Full path to the ROS2 parameters file to use for the slam_toolbox node'), IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ), Node( package='nav2_planner', executable='planner_server', name='planner_server', output='screen', respawn=use_respawn, respawn_delay=2.0, arguments=['--ros-args', '--log-level', log_level]), Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen'), Node( parameters=[ slam_toolbox_localization_file_dir, {'use_sim_time': use_sim_time, 'map_file_name': slam_toolbox_map_dir, 'map_start_pose': [0.0, 0.0, 0.0]} ], package='slam_toolbox', executable='localization_slam_toolbox_node', name='slam_toolbox', output='screen') ])slam_toolbox 配置文件如下;
slam_toolbox: ros__parameters: solver_plugin: solver_plugins::CeresSolver ceres_linear_solver: SPARSE_NORMAL_CHOLESKY ceres_preconditioner: SCHUR_JACOBI ceres_trust_strategy: LEVENBERG_MARQUARDT ceres_dogleg_type: TRADITIONAL_DOGLEG ceres_loss_function: None # ROS Parameters odom_frame: odom map_frame: map base_frame: base_footprint scan_topic: /scan mode: localization #localization # if you'd like to start localizing on bringup in a map and pose #map_file_name: 'cloister.yaml' map_start_pose: [0.0, 0.0, 0.0] debug_logging: false throttle_scans: 1 transform_publish_period: 0.02 #if 0 never publishes odometry map_update_interval: 5.0 resolution: 0.05 min_laser_range: 0.0 #for rastering images max_laser_range: 20.0 #for rastering images minimum_time_interval: 0.5 transform_timeout: 0.2 tf_buffer_duration: 30. stack_size_to_use: 40000000 #// program needs a larger stack size to serialize large maps # General Parameters use_scan_matching: true use_scan_barycenter: true minimum_travel_distance: 0.5 minimum_travel_heading: 0.5 scan_buffer_size: 3 scan_buffer_maximum_scan_distance: 10.0 link_match_minimum_response_fine: 0.1 link_scan_maximum_distance: 1.5 do_loop_closing: true loop_match_minimum_chain_size: 3 loop_match_maximum_variance_coarse: 3.0 loop_match_minimum_response_coarse: 0.35 loop_match_minimum_response_fine: 0.45 # Correlation Parameters - Correlation Parameters correlation_search_space_dimension: 0.5 correlation_search_space_resolution: 0.01 correlation_search_space_smear_deviation: 0.1 # Correlation Parameters - Loop Closure Parameters loop_search_space_dimension: 8.0 loop_search_space_resolution: 0.05 loop_search_space_smear_deviation: 0.03 loop_search_maximum_distance: 3.0 # Scan Matcher Parameters distance_variance_penalty: 0.5 angle_variance_penalty: 1.0 fine_search_angle_offset: 0.00349 coarse_search_angle_offset: 0.349 coarse_angle_resolution: 0.0349 minimum_angle_penalty: 0.9 minimum_distance_penalty: 0.5 use_response_expansion: true尝试过的解决方法:
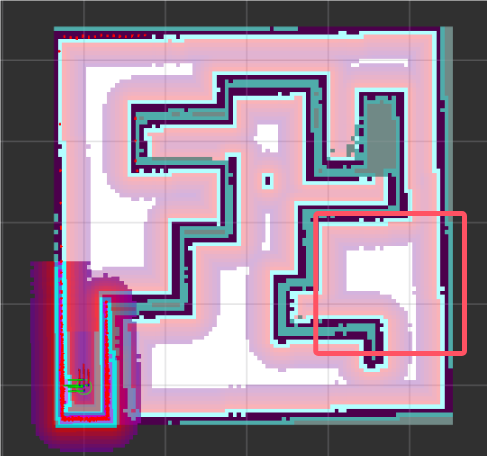
1.尝试过重新建图,故障依旧存在,但是地图“炸开”的位置改变了,导航到这里才会炸开,变为如下图
2.更换调用的RIVZ包,问题依旧。
因此前来请教各位老师和大家,希望大家帮我看看问题出现在哪,谢谢大家。
-
针对您在使用ROS 2 Humble版本和slam_toolbox进行导航定位时遇到的问题,这里有几个可能的原因和相应的解决步骤:
1. 地图坐标系和机器人坐标系不一致
问题描述:
- 地图和机器人之间的坐标转换可能存在问题,导致在特定区域时地图显示异常。
解决步骤:
- 确保
odom_frame、map_frame和base_frame在slam_toolbox的配置文件中正确设置,并且与机器人的实际坐标系相匹配。 - 检查TF树(使用
ros2 run tf2_ros tf2_echo base_footprint map等命令)以确保坐标转换正确无误。
2. 地图分辨率和机器人定位精度不匹配
问题描述:
- 地图的分辨率可能过高或过低,导致机器人在某些区域定位不准确。
解决步骤:
- 调整slam_toolbox中的
resolution参数,使其与机器人的定位精度相匹配。 - 检查并调整机器人的传感器配置,确保传感器数据能够准确反映环境。
3. 传感器数据问题
问题描述:
- 激光传感器数据可能存在噪声或异常值,导致slam_toolbox在处理数据时出错。
解决步骤:
- 检查激光传感器的数据输出,确保数据稳定且准确。
- 如果可能,尝试使用其他传感器(如视觉传感器)进行辅助定位。
4. slam_toolbox配置问题
问题描述:
- slam_toolbox的配置参数可能不适合当前环境或机器人。
解决步骤:
- 仔细审查slam_toolbox的配置文件,特别是与扫描匹配、循环闭合等相关的参数。
- 尝试调整这些参数,看是否能改善定位效果。
5. 导航算法和路径规划问题
问题描述:
- 导航算法可能无法为机器人规划出有效的路径,或者路径规划器在处理复杂环境时出错。
解决步骤:
- 检查导航算法和路径规划器的配置,确保它们适合当前环境。
- 尝试使用不同的导航算法或路径规划器,看是否能解决问题。
6. 性能和资源限制
问题描述:
- 系统资源(如CPU、内存)可能不足以支持slam_toolbox和导航系统的正常运行。
解决步骤:
- 监控系统的资源使用情况,确保有足够的资源供slam_toolbox和导航系统使用。
- 如果资源不足,考虑升级硬件或优化系统配置。
7. 软件和依赖项问题
问题描述:
- 使用的ROS 2版本、slam_toolbox版本或其他依赖项可能存在已知的bug或兼容性问题。
解决步骤:
- 检查ROS 2和slam_toolbox的官方文档和社区论坛,看是否有相关的bug报告或解决方案。
- 尝试更新ROS 2和slam_toolbox到最新版本,或回退到较稳定的版本。
希望这些建议能帮助您解决问题。如果问题仍然存在,您可能需要更详细地检查系统的日志和配置,或者寻求来自ROS 2社区或slam_toolbox开发者的帮助。
以上为生成回答,仅供参考~
-
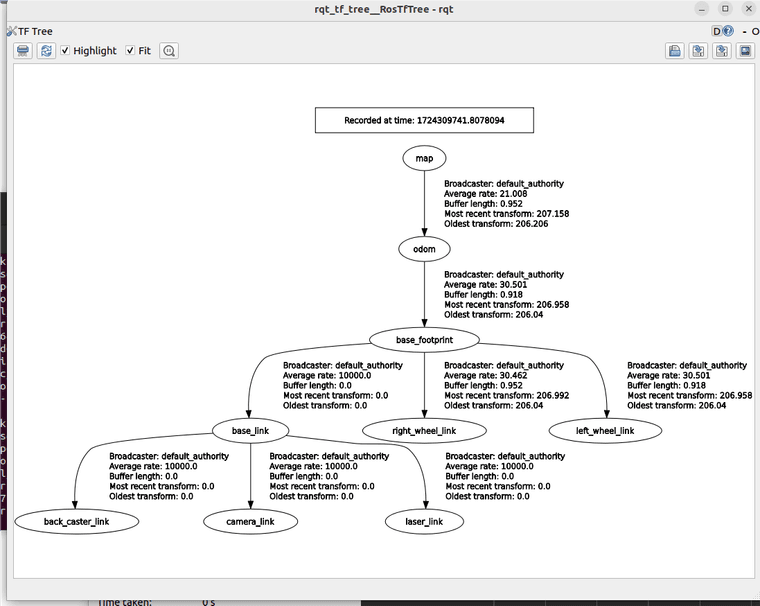
tf树情况如下:
-
请问解决了吗 这个问题 我也遇到了相同的问题