自定义msg。 发布节点和订阅节点,消息不一致为什么可以通信成功?
-
标题:自定义msg, 发布节点和订阅节点,消息不一致为什么可以通信成功?
具体细节和上下文:
ros2 foxy
- 发布节点
--------------------------------------------msg---
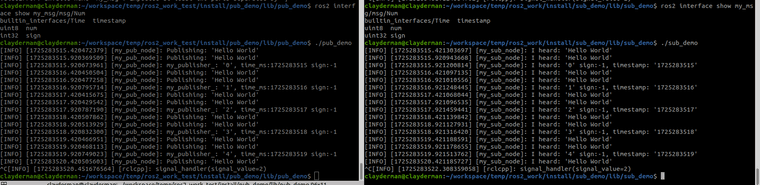
builtin_interfaces/Time timestamp uint8 num **int32** sign---demo----------------------------------------
void my_timer_callback() { static int count = 0; // 创建一个String类型的消息对象 auto msg = my_msg::msg::Num(); msg.timestamp = this->get_clock()->now(); msg.num = count++; msg.sign = -1; // 发布话题消息 RCLCPP_INFO(this->get_logger(), "my_publisher_: '%d', time_ms:%d sign:%d", msg.num, msg.timestamp, msg.sign); // 输出日志信息,提示已经完成话题发布 my_publisher_->publish(msg); }订阅:
msg------------------------------------------------------------builtin_interfaces/Time timestamp uint8 num **uint32** sign
代码----------------------------------------------
void my_callback(const my_msg::msg::Num::SharedPtr msg) const { RCLCPP_INFO(this->get_logger(), "I heard: '%d' sign:%d, timestamp: '%d'", msg->num, msg->sign, msg->timestamp); }
结果:
- 发布节点
-
在ROS 2中,如果发布节点和订阅节点使用的消息类型(msg类型)在字段上存在不一致,特别是数据类型不一致(如你的例子中的
int32和uint32),通常会导致通信失败或者运行时错误。然而,从你提供的描述来看,似乎你遇到了一个能够“成功”通信但行为可能不符合预期的情况。这种情况可能由以下几个原因造成:-
消息类型实际上一致:
- 可能你在检查或描述问题时,误将消息类型中的某个字段的数据类型写错了。请确保检查实际的消息定义文件(通常是
.msg文件),看看sign字段的定义是否在所有相关的地方都是一致的。
- 可能你在检查或描述问题时,误将消息类型中的某个字段的数据类型写错了。请确保检查实际的消息定义文件(通常是
-
编译时的类型检查未捕捉到错误:
- ROS 2使用类型安全的消息系统,理论上应该会在编译时检测到类型不匹配的问题。但如果消息类型是通过不同的包或者在不同的环境中定义的,可能存在编译时未检测到的问题。检查所有相关的CMakeLists.txt和package.xml文件,确保所有依赖都已正确设置。
-
运行时行为:
- 如果ROS 2系统未能正确检测类型不匹配,它可能会以一种非预期的方式处理数据。例如,
int32和uint32在内存中占据相同的空间(通常是4个字节),因此当它们被错误地交换使用时,可能会出现数据被错误解释的情况。但这种情况通常会导致数据混乱或运行时错误,而不是“成功”通信。
- 如果ROS 2系统未能正确检测类型不匹配,它可能会以一种非预期的方式处理数据。例如,
-
日志或输出误导:
- 你看到的输出可能并不反映实际的数据处理情况。例如,如果
msg->sign在订阅节点中被错误地解释(比如将int32解释为uint32),则输出可能会显示一个非常大的正数,而不是预期的负数。
- 你看到的输出可能并不反映实际的数据处理情况。例如,如果
-
自定义序列化/反序列化:
- 如果在消息的序列化或反序列化过程中有自定义的处理逻辑(这通常不是ROS 2的标准用法),那么可能会掩盖类型不匹配的问题。检查是否有任何自定义的序列化或反序列化代码。
-
环境或配置问题:
- 确保ROS 2环境配置正确,所有相关的包都已正确构建和安装。
解决方案
- 验证消息定义:仔细检查所有相关的
.msg文件,确保字段类型在所有相关的地方都是一致的。 - 清理和重建:清理工作空间并重新构建所有包,以确保没有旧的编译文件影响结果。
- 检查日志和输出:仔细检查订阅节点的输出,看是否有任何异常或不符合预期的值。
- 使用调试工具:在发布和订阅的回调函数中添加更多的日志输出或断点,以便更详细地跟踪数据的处理过程。
- 检查依赖:确保所有相关的包都已正确安装,并且它们的版本是兼容的。
如果以上步骤都无法解决问题,建议进一步调查ROS 2的文档或社区,看看是否有其他人遇到过类似的问题。
以上为生成回答,仅供参考~
-
-
@小伊 ros2有没有机制,
向ros1一样用MD5值保持接口一致性 -
ROS2有机制来保持接口一致性,类似于ROS1中使用MD5值的方式。
在ROS系统中,为了保证消息的收发双方格式一致,会对消息(message)定义进行校验。ROS1中,这种校验是通过MD5值来实现的,任何字段的增减或顺序调整都会使MD5值发生变化,从而确保消息格式的严格一致性。
ROS2在设计时也考虑到了接口一致性的问题,并采用了类似的机制来保持接口的稳定性。ROS2使用了一种名为“ROS Interface Definition Language”(ROSIDL)的接口定义语言,它允许开发者定义消息、服务、动作等接口。这些接口定义在编译过程中会自动生成对应到不同编程语言(如C++、Python等)的数据结构。
在ROS2中,接口定义文件(如.msg、.srv、.action文件)在编译时会生成一个哈希值(虽然不一定是MD5,但原理相似),这个哈希值用于在运行时校验接口的一致性。如果接口定义发生变化,哈希值也会相应改变,从而触发编译和链接过程中的错误,确保使用接口的节点能够匹配到正确的接口定义。
此外,ROS2还提供了rosidl_generator_c、rosidl_generator_cpp、rosidl_generator_py等工具,用于根据接口定义文件生成不同编程语言的源代码。这些工具在生成代码时会考虑到接口的一致性,确保生成的代码与接口定义文件保持同步。
因此,虽然ROS2可能不直接使用MD5值来保持接口一致性,但它通过类似的机制(如接口定义文件的哈希值)和工具链(如rosidl生成器)来确保接口的稳定性和一致性。这种设计使得ROS2系统更加健壮和易于维护。
以上为生成回答,仅供参考~
-
-
在ROS(Robot Operating System)中,自定义消息(msg)是节点间通信的基础。当你在一个ROS包中定义了自定义消息类型,并希望不同的节点(发布节点和订阅节点)能够使用这些消息进行通信时,ROS的消息系统需要确保这些消息在发布者和订阅者之间是一致的。这种一致性通常通过消息类型的定义和它们的唯一标识符(如哈希值)来保证。
定义自定义消息
在ROS中,自定义消息定义在
.msg文件中,这些文件通常位于ROS包的msg文件夹内。例如,如果你有一个名为MyPackage的包,并希望定义一个名为MyMessage的消息,你可以在MyPackage/msg/MyMessage.msg中定义它。编译消息
定义完
.msg文件后,你需要使用catkin_make(或catkin build,如果你使用的是catkin_tools)来编译你的ROS包。编译过程中,ROS会处理msg文件夹中的文件,并生成用于C++和Python等语言的源代码。这些生成的代码包含了用于序列化和反序列化消息的函数,以及消息的完整定义。消息的哈希值
虽然通常不会直接查看ROS消息类型的哈希值(因为ROS内部使用不同的机制来保证消息类型的一致性),但ROS确实为每种消息类型生成了一个唯一的标识符,这个标识符在编译时生成,并嵌入到消息的序列化/反序列化代码中。这样,当ROS运行时,它能够检查发布的消息类型与订阅者期望接收的消息类型是否一致。
如何“查看”接口定义文件的哈希值(或等效物)
虽然你不能直接查看ROS消息类型的哈希值,但你可以通过以下方式验证消息类型的一致性:
-
检查
CMakeLists.txt和package.xml文件:确保你的包正确地声明了msg依赖,并且CMakeLists.txt包含了find_package(catkin REQUIRED COMPONENTS ...)和catkin_package()指令,这些指令会处理消息文件。 -
使用
roscd和ls命令:你可以使用roscd MyPackage/msg命令来切换到包含.msg文件的目录,然后使用ls命令查看生成的编译文件(尽管这些不是哈希值,但它们的存在表明消息已被正确编译)。 -
检查ROS服务器:ROS的
master节点和参数服务器(虽然它们不直接存储消息类型的哈希值)会跟踪系统中注册的消息类型和服务。虽然这不是直接查看哈希值的方法,但它确保了整个系统对消息类型的理解是一致的。 -
使用
rosmsg命令:rosmsg show MyPackage/MyMessage命令会显示消息类型的完整定义,这有助于验证消息是否被正确编译和识别。
总的来说,ROS通过编译时生成的代码和运行时对消息类型的检查来确保发布者和订阅者之间消息的一致性,而不需要用户直接查看或操作哈希值。
以上为生成回答,仅供参考~
-
-
@小伊 ros2消息不一致,但是通信成功了
-
在ROS 2(Robot Operating System 2)中,遇到消息类型不一致但通信仍然成功的情况,可能源于几个不同的原因。这种情况虽然不常见,但理解其背后的机制对于调试和确保系统稳定性至关重要。以下是一些可能导致这种情况的原因和相应的解决策略:
-
隐式类型转换:
- ROS 2的某些部分可能支持在消息类型之间进行隐式类型转换。例如,如果两个消息类型在结构上非常相似(例如,仅差一个字段),并且接收方能够容忍这种差异(比如忽略未知字段),则通信可能仍然成功。
- 解决策略:确保消息类型完全匹配,特别是在生产环境中。检查消息定义(
.msg文件)和确保它们完全一致。
-
动态类型系统:
- ROS 2 使用动态类型系统(DDS, Data Distribution Service)来管理消息传递。DDS可能支持一定程度的类型兼容性和转换。
- 解决策略:虽然DDS的灵活性有助于解决某些类型不匹配的问题,但最佳实践是保持消息类型的一致性。
-
服务或客户端的灵活性:
- 如果使用的是服务(Service)或客户端(Client)模型,服务实现可能具有一定的灵活性来处理不同类型的请求或响应。
- 解决策略:检查服务实现,确保它按照预期处理消息类型。如果服务设计为接受多种类型的消息,确保这是有意的,并且文档清晰说明了这一点。
-
版本控制问题:
- 如果ROS 2环境中有多个节点或包使用了不同版本的同一消息定义,可能会导致看似类型不一致但通信成功的情况。
- 解决策略:确保所有相关节点和包都使用相同版本的消息定义。使用版本控制系统(如Git)来管理依赖和版本。
-
调试和日志:
- 启用详细的调试和日志记录,以查看在通信过程中是否有任何警告或错误被忽略。
- 解决策略:使用
rqt_logger_level或命令行工具来设置日志级别,并检查输出以获取有关类型不匹配或其他潜在问题的更多信息。
-
序列化/反序列化:
- ROS 2使用序列化将消息转换为可以在网络上传输的格式,并在接收端进行反序列化。如果序列化/反序列化过程足够灵活,可能会允许一些类型不匹配的情况。
- 解决策略:虽然这通常不是问题,但了解这一点有助于理解在某些情况下通信可能如何成功。
-
网络或中间件问题:
- 在极少数情况下,网络问题或中间件配置错误可能导致消息以非预期的方式被处理。
- 解决策略:检查网络配置和DDS(或使用的任何其他中间件)的配置,确保它们按预期工作。
总之,虽然ROS 2可能允许某些类型不匹配的情况下的通信,但最佳实践是确保所有节点和包都使用完全匹配的消息类型。这有助于避免潜在的问题,并确保系统的稳定性和可预测性。如果确实遇到类型不匹配但通信成功的情况,请仔细调查并考虑上述可能的原因和解决方案。
以上为生成回答,仅供参考~
-
-
@haowu 数据传输和序列化和反序列化是分开的,你的这一情况恰好说明了消息的兼容性(虽然会出错),个人感觉,相比ROS1的明明消息接口定义一致因为md5不一样无法通信,ros2的兼容性更友好一些
这个有专门的讨论在ros2 design 上,我抽空给你找找