在ubantu22.04下,下载ros2和gazebo和px4出现错误,球解决
-
-
在Ubuntu 22.04上安装ROS 2、Gazebo和PX4(通常指的是PX4 Flight Stack,与无人机相关的软件)可能会遇到一些依赖和兼容性问题。以下是一些步骤和建议,帮助你解决安装过程中可能遇到的问题。
1. 安装ROS 2
首先,确保你的Ubuntu系统已经更新到最新状态。
sudo apt update sudo apt upgrade接下来,设置ROS 2的仓库。这里以安装
foxy版本为例(请根据需要选择适合你的版本):sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list' sudo apt install curl curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - sudo apt update安装ROS 2基础包:
sudo apt install ros-foxy-desktop sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-vcstool sudo rosdep init rosdep update rosdep install --from-paths src --ignore-src --rosdistro foxy -r -y初始化ROS 2环境:
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc source ~/.bashrc2. 安装Gazebo
安装Gazebo 11(假设与你的ROS 2版本兼容):
sudo apt install gazebo11同时,你可能需要安装Gazebo的ROS 2插件:
sudo apt install ros-foxy-gazebo-ros-pkgs3. 安装PX4
PX4 Flight Stack的安装可能稍微复杂一些,因为它通常涉及从源代码编译。不过,你可以使用PX4的Devguide中的说明来安装:
-
安装依赖:根据PX4的Devguide安装必要的依赖项。
-
克隆PX4仓库:
git clone https://github.com/PX4/PX4-Autopilot.git cd PX4-Autopilot git submodule update --init --recursive -
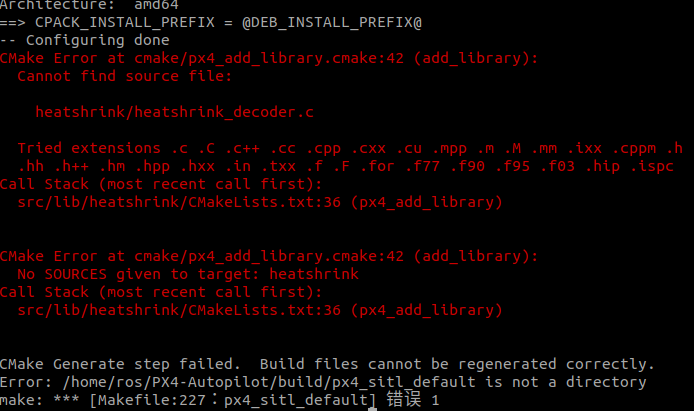
编译PX4:按照PX4的Devguide中的指示进行编译。
4. 解决可能的问题
- 依赖问题:确保所有依赖都是最新的,并且与你的ROS 2和Gazebo版本兼容。
- 权限问题:在编译或运行PX4时,确保你有足够的权限,或者使用
sudo(但通常不推荐在编译或运行ROS节点时使用sudo)。 - 版本冲突:检查你安装的每个软件的版本,确保它们之间没有冲突。
5. 验证安装
- 运行ROS 2的示例来确保ROS 2环境已正确设置。
- 使用Gazebo运行一个简单的仿真场景。
- 编译并运行PX4的示例或测试来验证PX4安装。
希望这些步骤能帮助你成功安装ROS 2、Gazebo和PX4!如果遇到具体问题,请提供详细的错误消息,以便进一步分析。
以上为生成回答,仅供参考~
-