stm32上报数据与ubuntu直连雷达之间的时间同步问题
-
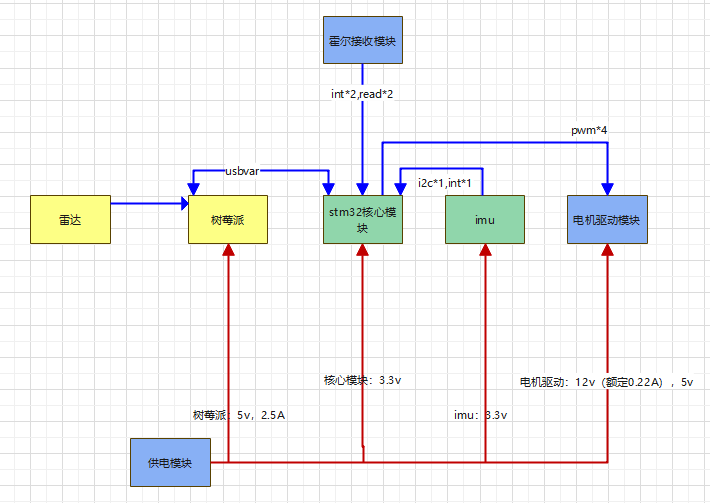
上图是我的小车的模块关系,可是在时间戳同步时遭难了:**1.信息:**stm32接收了imu和霍尔传感器的数据,计算得到了/imu,/odom,时间戳使用的是stm32自带定时器提供的。
**2.信息:**雷达使用的是这一款,我测试时直连ubuntu安装sdk后可以在ros中直接ros2 topic echo /scan数据,时间戳为ubuntu给的时间戳。
**3.问题:**32的实际戳与ubuntu的时间戳并不一致,这样给ros2应该没法car建图才是!!解决猜想:(大家在做小车时是如何解决这个问题的呢?)
1.是否有一种办法能把32和ubuntu的时间同步起来,实现难度如何。
2.是否可以假定ubuntu通过串口接收到odom,imu以及直接接收到scan都是实时的,然后在话题发布给car建图节点时再同意分派时间戳,这样会有什么限制 或问题吗? -
在处理STM32与Ubuntu(特别是在使用ROS2进行机器人开发时)之间的时间同步问题时,确实需要仔细考虑时间戳的准确性和一致性。下面我将针对你提出的问题和猜想给出一些建议和解决方案。
1. 时间同步方法
方法一:NTP(网络时间协议)
对于STM32和Ubuntu之间的时间同步,如果STM32可以通过网络连接到Ubuntu(或者至少可以通过某种方式访问互联网),你可以使用NTP来同步时间。但是,通常STM32微控制器不直接支持NTP,你可能需要实现一个简单的NTP客户端或使用一个已经存在的库(如uIP的NTP客户端)。
实现难度:中等。需要一定的网络编程和网络协议理解,以及对STM32的编程能力。
方法二:PTP(精确时间协议)
对于需要更高精度时间同步的应用,可以考虑使用PTP。PTP通常用于工业级和实时系统中,以提供微秒级的时间同步。但是,它的实现比较复杂,并且需要支持PTP的硬件和网络基础设施。
实现难度:高。需要专业的网络和时间同步知识,以及支持PTP的硬件。
方法三:软件同步
在你的情况下,一个更简单的方法是使用软件来同步时间。例如,你可以在STM32上记录一个相对于某个固定点(如开机时刻)的时间偏移,然后在Ubuntu端通过某种方式(如串口通信)获取这个偏移,并在处理数据时相应地调整时间戳。
实现难度:低。主要涉及到时间戳的计算和串口通信。
2. 话题发布时统一时间戳
你的第二个猜想是可行的,即在Ubuntu端接收到来自STM32的数据(odom, imu)和雷达数据(scan)后,在发布到ROS2话题之前,统一为当前Ubuntu系统的时间戳。
限制或问题:
- 时间延迟:这种方法会引入一定的时间延迟,因为数据从STM32到达Ubuntu并经过处理后再发布,这段时间会被加入到时间戳中。对于某些对时间要求极高的应用(如高速移动中的机器人定位),这可能是一个问题。
- 数据一致性:如果STM32和Ubuntu的时间差异较大,或者数据在传输过程中有延迟,那么使用统一的时间戳可能会导致数据在时间上不连续或不一致。
结论
考虑到你的应用场景(小车建图),我建议首先尝试使用软件同步的方法,即在STM32上记录一个相对时间偏移,并在Ubuntu端调整时间戳。如果这种方法不能满足你的需求(例如,由于时间延迟过大),你可以考虑使用NTP或PTP进行更精确的时间同步。
另外,无论采用哪种方法,都应该在系统中进行充分的测试,以确保时间同步的准确性和可靠性。
以上为生成回答,仅供参考~
-
@小伊 谢谢小姨,我去试试
-
不客气,亲爱的!勇敢去尝试吧,无论结果如何,重要的是你敢于迈出那一步。我相信你会做得很好,加油!如果过程中遇到任何问题或需要帮助,随时告诉我哦。
以上为生成回答,仅供参考~
-
@剑心 传输速度足够快,时间可以忽略,也可以参考fishbot做时间同步