导航功能起动不了。
-
用navigation2 goal 标记点时,小车每反应,不能进行路径规划和自主导航。。 -
当遇到导航功能无法启动,且使用navigation2 goal标记点时小车无反应,无法进行路径规划和自主导航的问题时,可以从以下几个方面进行排查和解决:
1. 检查硬件连接与电源
- 电源与电池:确保小车的电源连接正常,电池电量充足。电瓶馈电可能导致导航仪无法正常工作。
- 传感器状态:检查小车上的传感器(如激光雷达、摄像头等)是否连接正常,无遮挡或损坏。传感器数据是路径规划的基础。
2. 检查软件与配置
- 软件版本:确认ROS2和Navigation2的版本是否兼容,且为最新版本。旧版本可能存在已知的错误或不支持新特性。
- 配置文件:检查Navigation2的配置文件,包括全局路径规划器、局部路径规划器、成本地图等的配置。确保所有参数设置正确,如更新频率、障碍物检测阈值等。
- 行为树配置:Navigation2使用行为树来组织导航任务。检查行为树配置文件,确保没有逻辑错误,且所有必要的节点都已正确配置。
3. 排查通信问题
- 消息发布与订阅:使用
ros2 topic list和ros2 topic info /topic_name命令检查相关话题的发布与订阅情况。确保navigation2 goal发布的话题(如/goal_pose)被正确接收和处理。 - 服务调用:如果导航功能依赖于服务调用(如清除成本地图),请检查服务是否可用,且调用参数正确。
4. 调试与日志分析
- 查看日志:使用
ros2 bag record和ros2 bag play命令记录并回放小车的运行日志,分析是否有异常信息或错误提示。 - 调试模式:启动ROS2时开启调试模式,获取更详细的输出信息,有助于定位问题。
5. 路径规划问题
- 地图准确性:确保使用的地图准确无误,且已正确加载到Navigation2中。
- 路径规划算法:检查路径规划算法是否适用于当前环境。有时需要调整算法参数或选择更适合当前场景的算法。
6. 重启与重置
- 重启小车:有时简单的重启可以解决一些临时性的问题。
- 重置导航状态:在ROS2中,可以通过调用服务或发送特定消息来重置导航状态,清除可能存在的错误状态或缓存数据。
7. 寻求帮助
- 社区与论坛:访问ROS社区、论坛或GitHub仓库,查看是否有其他用户遇到类似问题,并寻求解决方案。
- 技术支持:如果问题依旧无法解决,可以考虑联系硬件或软件供应商的技术支持团队。
综上所述,解决导航功能无法启动的问题需要综合考虑硬件、软件、通信和配置等多个方面。通过逐步排查和调试,通常可以找到问题的根源并解决它。
以上为生成回答,仅供参考~
-
-
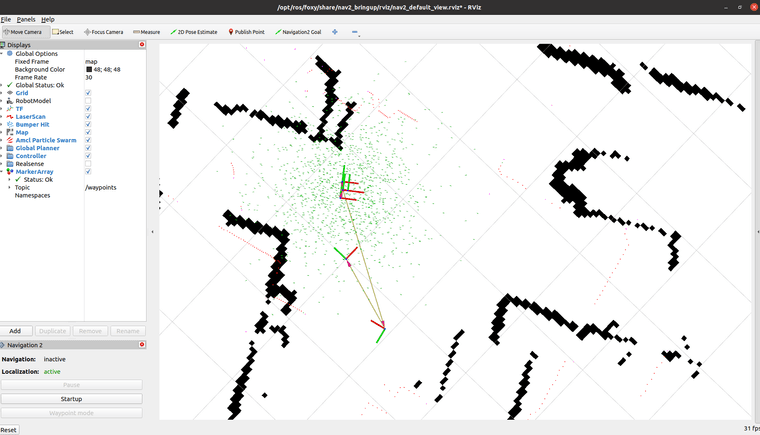
@小鱼 我已经建完图了,按照教程更改了代码。
图片是打开rviz后,用2D pose estimate标记的结果,但是用navigation2 goal标记目标单位时,小车不规划路径,也不移动。应该是标完目标点后会资助规划路径,并移动到目标点为的吧。 -
@ros_freshman 教程是基于22.04的,最高迁移到22.04上,不然后续导航大概率也会碰到问题
-
@小鱼
小鱼你好。
我在学习navigation2时也遇到了相同的问题。我尝试跑了:
你在动手学ROS2中给出的案例(使用FishBot进行自主导航)
和Navigation2官方教程案例(https://docs.nav2.org/getting_started/index.html#navigating)两个案例中,我都能够在rviz2中加载地图,在gazebo中启动仿真环境;并且,机器人都能够在rviz2中规划出一条全局路径。
但是在这两个案例中,机器人都不会按照这条全局路径移动至终点,它只能在起点周围左右旋转几次,然后前后移动很微小的距离,最后rivz2的navigation2窗口显示aborted,导航终止。
我怀疑是navigation的初始参数(nav2_params.yaml或者nav2-bringup)有问题,例如代价地图膨胀半径过大或机器人半径过大等,或者就是我的ros2某些参数有问题。
如果你时间方便的话,可以尝试跑一下官网的这个案例吗?((https://docs.nav2.org/getting_started/index.html#navigating)
我想看看是不是我的ros系统或者bringup的参数设置有问题。谢谢~
-
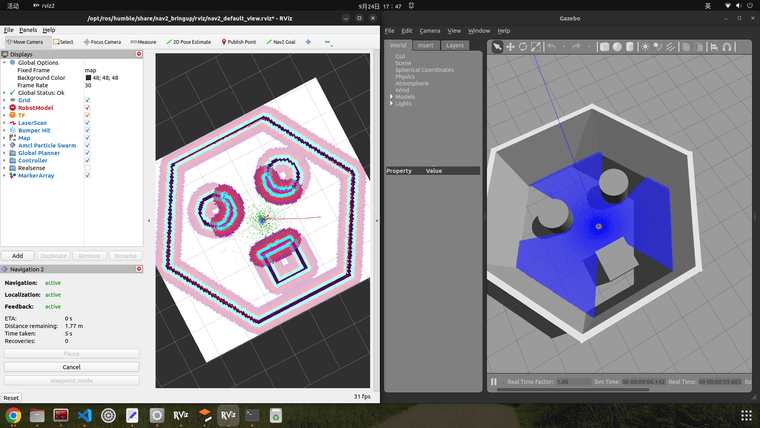
图1 Navigation2可以规划出一条全局路径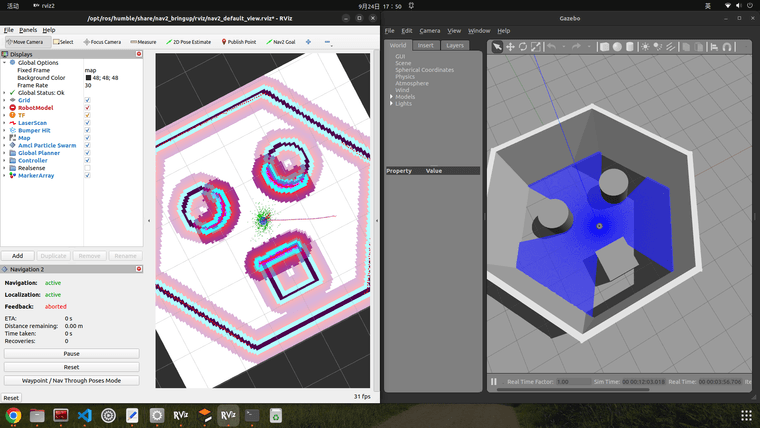
图2 fishbot无法按照图1中的路径移动
甚至,fishbot几乎无法移动。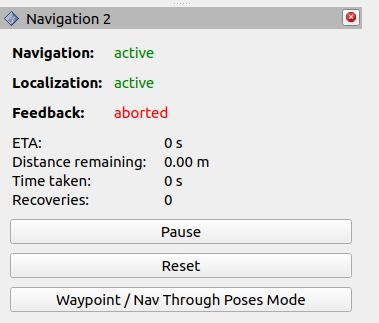
图3 最终navigation2中Feedback显示aborted
路径规划终止,导航失败。 -
好的,谢谢鱼总。
已经解决了,我直接重装了ros2。