ros2 使用自定义msg,编译时报错找不到头文件
-
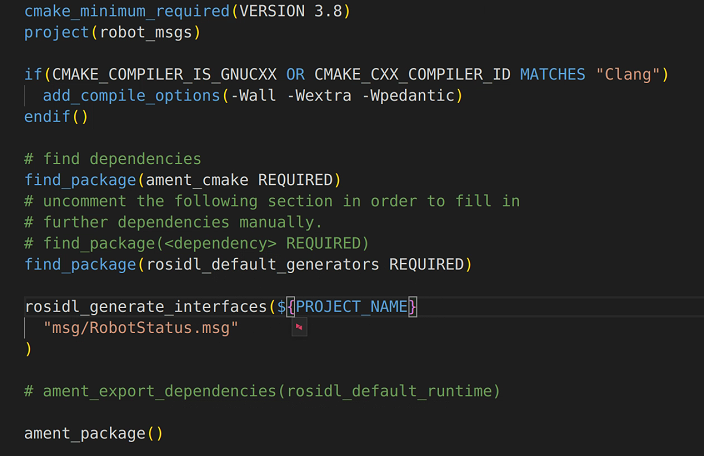
我在ubnunt22.04,ros版本humble下自定义了一个robot_msgs的包,然后在其中创建了msg文件夹,并在文件夹中创建了RobotStatus,msg文件,cmakelist内容如下,
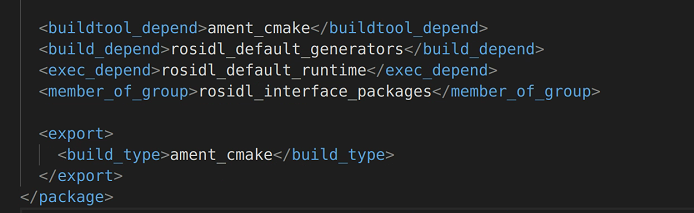
package.xml文件如下,
对该功能包进行编译后在install的目录下出现了自定义msg的头文件,具体结构如下,
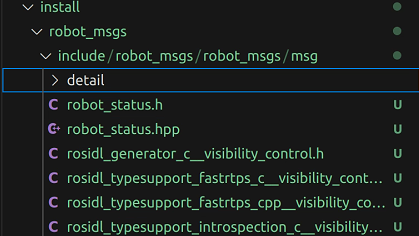
我看很多网上其他帖子自定义msg后install目录下的结构时robot_msgs/include/robot_msgs/msg,而不是我这样的robot_msgs/include/robot_msgs/robot_msgs/msg,但是我查看了下ros的标准msg的路径确实也是我这样的结构,所以不确定这个结构是否是正确的,但是我在该工程下source 以后使用ros2 interface show robot_msgs/msg/RobotStatus指令,也是能正常显示该msg的数据结构,我就假设该自定义msg生成正确,然后在另一个功能包中使用了该msg,另一个功能中的cmakelist如下
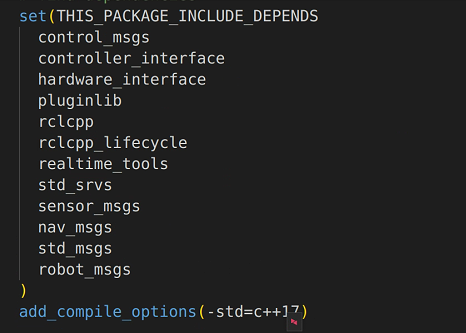
package.xml中也添加了 <depend>robot_msgs</depend>标签,但是在该功能包中使用自定义msg头文件#include <robot_msgs/msg/RobotStatus.hpp>时,却报错找不到头文件

求教大神帮忙分析下找不到头文件的原因是什么 -
在ROS 2中,当你遇到找不到自定义消息(message)头文件的问题时,通常是由于以下几个原因造成的:
-
CMakeLists.txt 和 package.xml 配置问题:确保你的
CMakeLists.txt和package.xml文件正确配置了消息的生成和依赖。 -
头文件路径问题:在ROS 2中,头文件的路径通常是
<package_name>/include/<package_name>/msg,但你的描述中提到路径是robot_msgs/include/robot_msgs/robot_msgs/msg,这看起来有些不寻常。这可能是由于某些配置错误或自动生成的问题。 -
编译和安装问题:确保你的包已经正确编译并安装。这包括运行
colcon build和colcon install(或者如果你使用的是ament_build系统,则是ament build和ament install)。 -
环境变量问题:确保你的ROS 2环境变量设置正确,特别是
CMAKE_PREFIX_PATH和PYTHONPATH,它们需要包含ROS 2的安装路径和你的工作空间的安装路径。 -
源工作空间:在编译并安装你的工作空间后,确保你已经
source了安装脚本(通常是<workspace>/install/setup.bash),这样ROS 2才能找到你的新包和头文件。
解决步骤
-
检查CMakeLists.txt:
确保你的CMakeLists.txt中包含了find_package(ament_cmake REQUIRED COMPONENTS ...)(其中...包含rosidl_default_generators),以及rosidl_generate_interfaces()宏的调用,用于生成消息的头文件和其他相关文件。示例:
find_package(ament_cmake REQUIRED COMPONENTS rosidl_default_generators # 其他依赖 ) rosidl_generate_interfaces(${PROJECT_NAME} "msg/RobotStatus.msg" DEPENDENCIES # 如果有其他依赖,请在这里列出 ) ament_target_dependencies(${PROJECT_NAME}_generate_messages_cpp DEPENDENCIES # 如果有其他依赖,请在这里列出 ) install(DIRECTORY include/ DESTINATION include ) -
检查package.xml:
确保你的package.xml文件中包含了正确的依赖和导出信息。示例:
<package format="3"> <name>robot_msgs</name> <version>0.0.1</version> <maintainer email="you@example.com">Your Name</maintainer> <license>BSD-3-Clause</license> <buildtool_depend>ament_cmake</buildtool_depend> <depend>rosidl_default_generators</depend> <exec_depend>rosidl_runtime_c</exec_depend> <exec_depend>rosidl_typesupport_c</exec_depend> <exec_depend>rosidl_typesupport_cpp</exec_depend> <member_of_group>rosidl_interface_packages</member_of_group> <export> <build_type>ament_cmake</build_type> </export> </package> -
重新编译和安装:
清理你的工作空间(可选),然后使用colcon build和colcon install重新编译和安装你的包。 -
源工作空间:
在编译和安装后,确保你已经source了安装脚本。 -
检查头文件路径:
在另一个包中,尝试直接查看头文件的实际路径,确保它位于你预期的位置。 -
检查CMakeLists.txt中的包含路径:
如果问题仍然存在,检查你的其他包的CMakeLists.txt文件,确保它包含了正确的包含路径。
按照这些步骤操作后,你的问题应该能得到解决。如果问题仍然存在,请检查具体的编译和运行时错误消息,以便进一步诊断问题。
以上为生成回答,仅供参考~
-