ros2 运行gazebo报错
-
运行一个启动gazebo仿真的launch文件,gazebo会卡死变成透明的,求助大家怎么解决
-
遇到ROS 2与Gazebo结合使用时Gazebo界面卡死或变成透明的问题,可能是由多种原因引起的。以下是一些排查和解决这类问题的步骤:
-
检查硬件要求:
- 确保你的计算机满足运行Gazebo和ROS 2的硬件要求。Gazebo是一个资源密集型的模拟器,特别是在使用复杂模型和大量传感器时。
-
更新和安装:
- 确保你的ROS 2和Gazebo都是最新版本。可以使用
apt update和apt upgrade来更新你的Ubuntu系统,然后重新安装或更新ROS 2和Gazebo。 - 检查Gazebo的插件和依赖是否都正确安装。
- 确保你的ROS 2和Gazebo都是最新版本。可以使用
-
检查launch文件:
- 仔细检查你的launch文件,确保所有参数都正确设置,特别是与Gazebo相关的参数,如世界文件(
.world)、模型文件(.urdf或.sdf)的路径等。 - 确保launch文件中没有启动多个Gazebo实例的指令。
- 仔细检查你的launch文件,确保所有参数都正确设置,特别是与Gazebo相关的参数,如世界文件(
-
内存和CPU使用:
- 使用系统监视器(如
htop或top)查看CPU和内存使用情况。如果资源使用接近或达到100%,这可能是Gazebo卡顿的原因。 - 尝试减少仿真中的复杂性和元素数量,比如减少机器人的传感器数量或简化世界模型。
- 使用系统监视器(如
-
图形驱动:
- 确保你的图形驱动是最新的,并且与你的GPU兼容。对于NVIDIA GPU,可以使用
nvidia-smi来检查GPU状态和驱动版本。 - 尝试更改Gazebo的图形设置,如降低渲染质量或更改渲染引擎。
- 确保你的图形驱动是最新的,并且与你的GPU兼容。对于NVIDIA GPU,可以使用
-
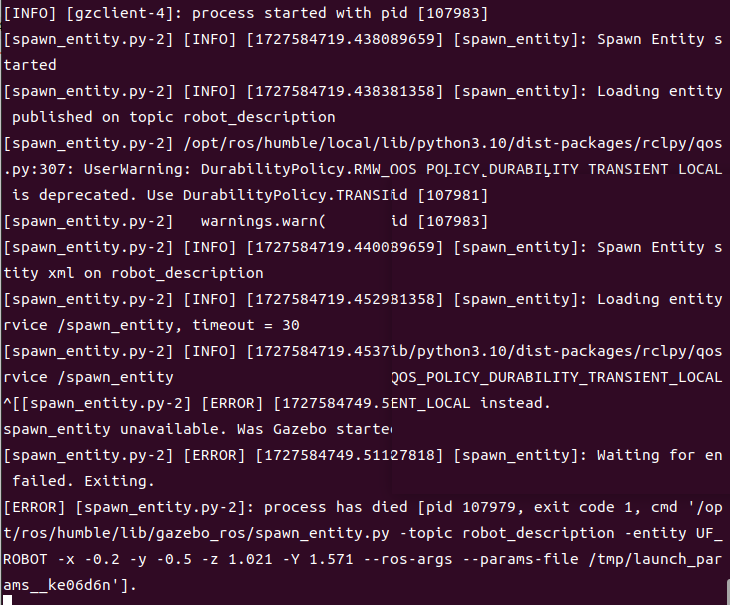
查看日志:
- 检查ROS 2和Gazebo的日志文件,通常可以在
~/.ros/log和Gazebo的日志输出中找到有用的错误信息。 - 也可以尝试在终端中直接运行Gazebo(而不是通过ROS 2的launch文件),以查看是否有更详细的错误信息输出。
- 检查ROS 2和Gazebo的日志文件,通常可以在
-
环境问题:
- 确保你的ROS 2环境变量设置正确,特别是
ROS_DOMAIN_ID和ROS_PACKAGE_PATH。 - 如果你在使用虚拟环境,确保所有的包和依赖都正确安装在该环境中。
- 确保你的ROS 2环境变量设置正确,特别是
-
社区和论坛:
- 搜索ROS和Gazebo的官方论坛、Stack Overflow或GitHub问题跟踪器,看看是否有其他人遇到了类似的问题并找到了解决方案。
-
重新安装:
- 如果以上步骤都无法解决问题,考虑卸载ROS 2和Gazebo,然后重新安装。这有时可以解决由于安装过程中出现的问题导致的错误。
希望这些步骤能帮助你解决问题!如果问题仍然存在,请提供更详细的错误信息和系统配置,以便进一步分析。
以上为生成回答,仅供参考~
-
-
@小鱼 大佬有时间看一下