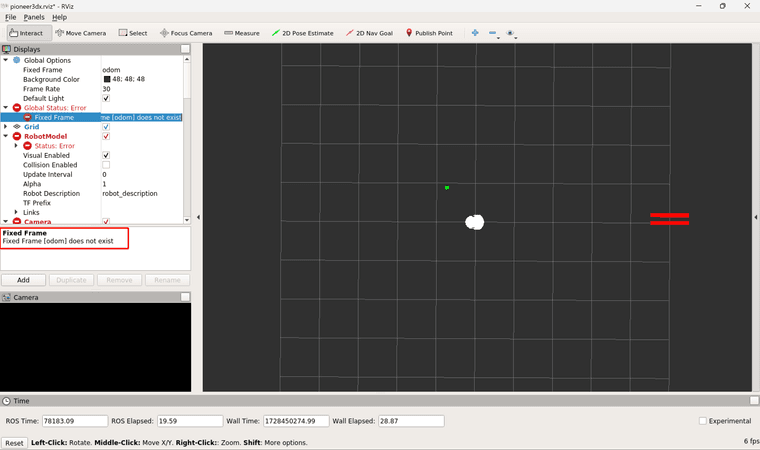
noetic版本的程序移植到melodic上面,rviz提示没有odom坐标系。请问如何解决。程序跑在noetic上可以正常运行
-
-
当您尝试将基于ROS Noetic的程序移植到ROS Melodic时,遇到
rviz提示没有odom坐标系的问题,这通常与坐标变换(TF)的设置和机器人的导航或定位配置有关。以下是一些可能的解决步骤:-
检查TF发布者:
确认在Melodic版本中,是否所有应该发布odom到map或base_link到odom变换的节点都在运行。这通常涉及到机器人的定位节点(如amcl、gmapping、hector_slam、cartographer等)。 -
查看ROS节点和话题:
使用rostopic list和rosnode list查看所有运行中的节点和话题,确认是否有与Noetic版本中相似的输出。特别关注与TF相关的节点和话题,如/tf、/tf_static、/odom等。 -
检查TF树:
使用rosrun tf view_frames.py(确保已安装tf_tools包)来查看当前的TF树。这可以帮助您确认odom是否存在于TF树中,以及它与其他坐标系的连接情况。 -
检查启动文件:
确保所有必要的节点都在您的.launch文件中被正确启动。比较Noetic和Melodic版本的.launch文件,看是否有遗漏或不同的配置。 -
配置和参数:
检查机器人定位或导航相关的配置文件和参数设置。有时,参数的微小差异(如频率、阈值等)可能导致不同的行为。 -
依赖库和插件:
确保所有依赖的库和插件都兼容Melodic。有时,某些库的新版本可能不再支持Melodic。 -
日志和错误消息:
仔细查看ROS的日志文件(通常位于~/.ros/log/目录下),查找与TF或定位相关的错误或警告。 -
环境差异:
检查您的ROS环境(如工作空间、包版本等)是否已正确设置。确保所有包都是为Melodic编译的。 -
使用ROS Wiki和社区资源:
如果问题仍然存在,查看ROS Wiki和社区论坛,看看是否有其他人遇到并解决了类似的问题。 -
逐步调试:
如果可能,尝试逐步添加或删除组件(如传感器、算法等),以确定是哪个部分导致了问题。
通过上述步骤,您应该能够诊断并解决
rviz中缺少odom坐标系的问题。如果问题仍然存在,可能需要更深入地分析您的具体配置和代码。
以上为生成回答,仅供参考~
-