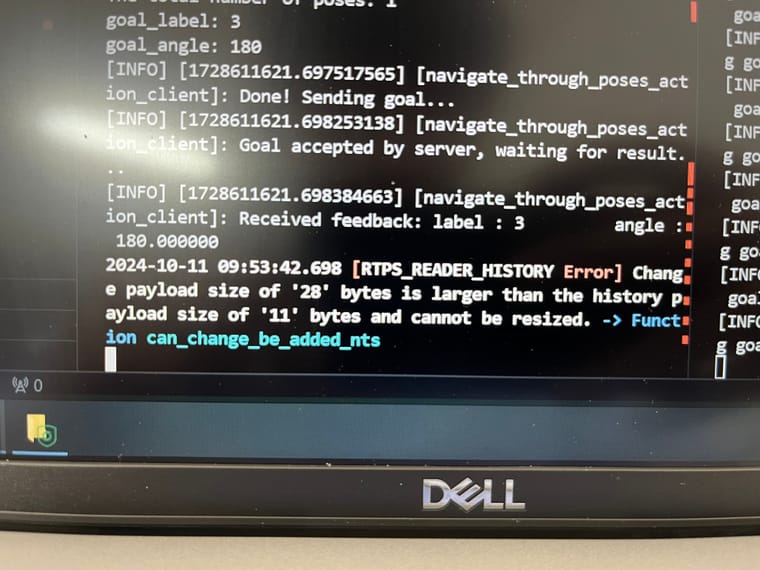
Ros2-RTPS报错
-
-
在使用ROS 2(Robot Operating System 2)结合RTPS(Real-Time Publish Subscribe,通常指的是DDS(Data Distribution Service)的一个实现,如RTPS/DDS-XRCE或eProsima的Fast RTPS)时遇到报错,可能由多种原因引起。为了更具体地帮助你解决问题,我会列出一些常见的错误类型、可能的原因以及解决方案。
1. 初始化错误
错误示例:
Could not initialize participant: Error in creating participant.
可能原因:
- DDS域ID未正确设置或冲突。
- 网络配置问题(如多播地址、端口等)。
- 权限问题(尤其是在Linux系统中,多播通常需要特定的权限)。
解决方案:
- 检查并设置正确的DDS域ID。
- 确保网络配置(如多播地址和端口)没有冲突,并且适用于你的网络环境。
- 在Linux上,尝试以root用户运行你的ROS 2应用,或者为多播配置适当的权限(如设置
sysctl的net.ipv4.ip_forward=1和net.ipv4.conf.all.proxy_arp=1等,但注意这些可能不是必要的,具体取决于你的网络设置)。
2. 参与者(Participant)和发布者/订阅者(Publisher/Subscriber)错误
错误示例:
Error creating writer/reader
可能原因:
- 话题(Topic)名称、类型或QoS设置不匹配。
- RTPS库的内部错误。
解决方案:
- 确保话题名称、类型(如消息类型)和QoS设置在所有相关的发布者和订阅者之间是一致的。
- 检查是否有RTPS库的已知问题或更新到最新版本。
3. 序列化/反序列化错误
错误示例:
Failed to serialize/deserialize message
可能原因:
- 消息类型在发布者和订阅者之间不一致。
- 使用了不支持的字段类型或复杂的嵌套结构。
解决方案:
- 确保所有节点使用完全相同的消息定义(通常是
.msg和.idl文件)。 - 检查是否有复杂的字段类型(如指针、动态数组等),这些可能需要特殊的处理。
4. 权限或配置问题
错误示例:
- 与权限相关的错误(如
Permission denied)
可能原因:
- 文件或目录的访问权限。
- ROS 2配置文件的权限或位置。
解决方案:
- 检查并调整文件/目录的权限。
- 确保ROS 2的配置文件(如
settings.yaml)位于正确的位置,并具有适当的权限。
5. 调试和日志
- 启用详细日志:在ROS 2中,你可以通过设置环境变量
RCL_LOGGING_CONFIG_FILE来启用更详细的日志记录。这有助于诊断问题。 - 检查网络:使用网络工具(如
tcpdump、wireshark)来检查网络上的RTPS流量。
最后,如果上述方法都不能解决问题,建议查看ROS 2和RTPS库的官方文档、社区论坛和GitHub问题跟踪器,看看是否有其他人遇到了类似的问题并找到了解决方案。
以上为生成回答,仅供参考~