vscode+wsl(ubuntu22.04)运行3.4.3历程无反应
-
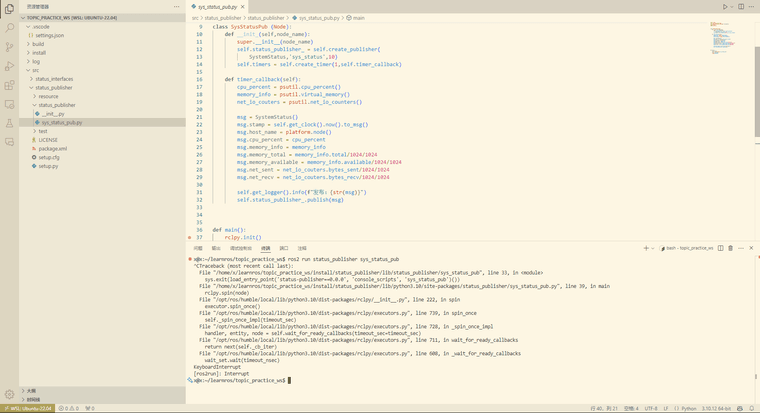
vscode+wsl(ubuntu22.04)运行3.4.3例程无反应
尝试检查包是否正确构建和安装,发现无误

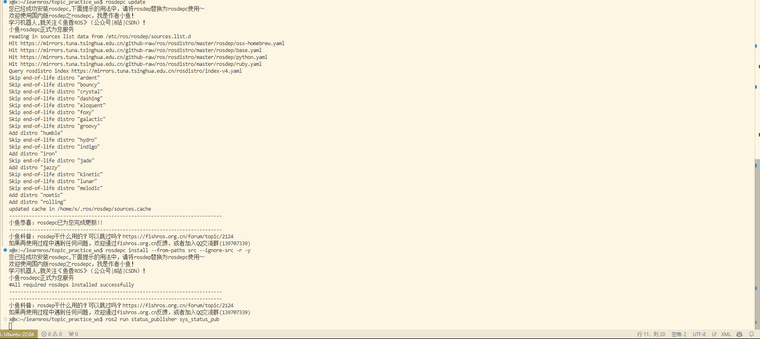
尝试运行rosdepc检查依赖项是否已安装
最后依旧无反应
-
针对您在使用VS Code配合WSL(Ubuntu 22.04)运行ROS(机器人操作系统)3.4.3版本例程时遇到的问题,即VS Code无反应,以下是一些可能的解决步骤和检查点:
1. 检查VS Code与WSL的集成
-
确保WSL已正确安装:
- 可以在Windows PowerShell或命令提示符中运行
wsl --list --verbose来检查已安装的WSL发行版和状态。
- 可以在Windows PowerShell或命令提示符中运行
-
安装VS Code的Remote - WSL扩展:
- 在VS Code中,点击左侧的扩展图标(或使用快捷键Ctrl+Shift+X),搜索“Remote - WSL”并安装。
- 安装后,可以通过VS Code的命令面板(Ctrl+Shift+P)输入“Remote-WSL: New Window”来打开一个新的VS Code窗口,该窗口与WSL集成。
-
在WSL中直接运行VS Code:
- 在WSL的Ubuntu 22.04环境中,确保
code命令可用。如果不可用,可能需要将VS Code添加到WSL的PATH中,或者通过VS Code的安装路径直接运行(如/mnt/c/Users/YourUsername/AppData/Local/Programs/Microsoft VS Code/bin/code,路径可能因安装位置而异)。
- 在WSL的Ubuntu 22.04环境中,确保
2. 检查ROS环境
-
确认ROS版本和环境:
- 确保您已正确安装了ROS 3.4.3(注意:ROS的官方版本通常表示为“Melodic Morenia”,对应Ubuntu 18.04,而不是直接标注为3.4.3。如果您指的是特定的ROS包或工具链版本,请确认其兼容性和安装方法)。
- 检查ROS环境变量(如
ROS_PACKAGE_PATH、ROS_HOME等)是否设置正确。
-
使用
rosdep检查依赖:- 既然您已经使用了
rosdep检查依赖项,请确保所有必需的依赖都已安装且版本兼容。 - 如果有缺失的依赖,
rosdep会提供安装命令,请按照提示执行。
- 既然您已经使用了
3. 检查VS Code配置和插件
-
安装ROS插件:
- 在VS Code中,检查是否已安装ROS相关的插件,如“ROS”或“ROS: Build Systems”(由Microsoft提供)。
- 这些插件可以提供ROS项目的编译、调试和运行支持。
-
检查调试配置:
- 在VS Code中,点击左侧的调试按钮(虫子图标),检查是否有为ROS项目配置的调试配置。
- 如果没有,可以创建新的调试配置,确保它指向正确的ROS启动脚本或命令。
4. 查看日志和错误信息
-
VS Code日志:
- 查看VS Code的输出或终端窗口,看是否有任何错误或警告信息。
- 也可以在VS Code的“帮助”菜单中选择“切换开发人员工具”来查看更详细的日志。
-
ROS日志:
- 运行ROS节点时,查看ROS的控制台输出或日志文件(通常位于
~/.ros/log/目录下),以获取可能的错误或警告信息。
- 运行ROS节点时,查看ROS的控制台输出或日志文件(通常位于
5. 尝试其他命令或方法
-
直接在WSL中运行ROS节点:
- 尝试在WSL的终端中直接运行ROS节点命令,看是否能成功运行。
- 这有助于确定问题是否出在VS Code的集成或配置上。
-
重启WSL和VS Code:
- 有时重启WSL会话和VS Code可以解决一些暂时性的问题。
6. 寻求社区帮助
如果以上步骤都无法解决问题,您可以在ROS的官方论坛、GitHub仓库或VS Code的社区中寻求帮助。提供详细的错误信息和您已经尝试过的解决步骤将有助于他人更快地定位问题。
以上为生成回答,仅供参考~
-