ros-noetic四轮差速小车gazebo仿真,在rviz中车轮不转
-
<gazebo>
<plugin name="skid_steer_drive_controller" filename="libgazebo_ros_skid_steer_drive.so">
<updateRate>100.0</updateRate>
<robotNamespace>/</robotNamespace>
<leftFrontJoint>wheel_lf_2_base</leftFrontJoint>
<rightFrontJoint>wheel_rf_2_base</rightFrontJoint>
<leftRearJoint>wheel_lb_2_base</leftRearJoint>
<rightRearJoint>wheel_rb_2_base</rightRearJoint>
<wheelSeparation>0.584</wheelSeparation>
<wheelDiameter>0.33</wheelDiameter>
<robotBaseFrame>base_footprint</robotBaseFrame>
<torque>50</torque>
<commandTopic>cmd_vel</commandTopic>
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<publish_wheel_tf>true</publish_wheel_tf>
<broadcastTF>true</broadcastTF>
</plugin>
</gazebo>
使用该控制器,发现在rviz中车轮的tf坐标不会转动,为什么,如何解决 -
当你在使用ROS Noetic和Gazebo进行四轮差速小车仿真时,遇到车轮在RViz中不转的问题,通常与几个关键因素相关:Gazebo中的物理仿真、ROS节点之间的通信、以及RViz的配置。以下是一些可能的解决步骤和检查点:
-
检查Gazebo中的物理仿真:
- 确保Gazebo中的小车模型正确设置了物理属性,如质量、惯性、摩擦等。
- 检查车轮的关节(joint)是否设置为连续旋转(continuous)或具有适当的限制(limits),以允许它们自由旋转。
-
检查ROS节点和通信:
- 确保
skid_steer_drive_controller插件正确加载并运行。你可以在ROS的终端中查看相关日志,确认是否有错误或警告信息。 - 使用
rostopic list查看是否有cmd_vel和odom等话题被正确发布和订阅。 - 使用
rostopic echo /cmd_vel来检查是否有速度命令被发送到小车。
- 确保
-
检查RViz配置:
- 在RViz中,确保你已经添加了
TF显示,并正确设置了Fixed Frame(通常是odom或base_footprint,取决于你的配置)。 - 检查是否有添加车轮的TF(Transform Frames)到RViz的Displays中。你可以通过添加
TF或Marker类型的Display来查看车轮的TF。 - 确保RViz的更新频率足够高,以便能够实时显示车轮的运动。
- 在RViz中,确保你已经添加了
-
检查URDF/XACRO文件:
- 确保URDF或XACRO文件中定义的关节名称与
skid_steer_drive_controller插件中指定的关节名称完全匹配。 - 检查URDF/XACRO文件中是否有任何可能导致物理仿真问题的配置错误。
- 确保URDF或XACRO文件中定义的关节名称与
-
调试和日志:
- 使用
roslaunch或rosrun命令的--screen选项来运行你的节点,以便在终端中看到更详细的输出。 - 检查Gazebo的日志文件,通常位于
~/.gazebo/logs目录下,以获取更多关于物理仿真的信息。
- 使用
-
重新加载和重启:
- 有时,简单地重启Gazebo和ROS节点可以解决一些看似复杂的问题。
- 清除ROS的工作空间并重新编译可能也是必要的。
-
检查硬件接口:
- 确保你的
skid_steer_drive_controller配置与你的硬件接口(在这个情况下是Gazebo仿真)兼容。
- 确保你的
如果以上步骤都不能解决问题,你可能需要更详细地检查你的ROS节点和Gazebo仿真的配置,或者考虑在ROS社区或相关论坛中寻求帮助。
以上为生成回答,仅供参考~
-
-
@zxcmoonss 有没有正常启动加载呢,日志提供下
-
这是我的控制器配置
robot name="my_move" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 传动实现:用于连接控制器与关节 --> <xacro:macro name="joint_trans" params="joint_name"> <!-- Transmission is important to link the joints and the controller --> <transmission name="${joint_name}_trans"> <type>transmission_interface/SimpleTransmission</type> <joint name="${joint_name}"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="${joint_name}_motor"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> </xacro:macro> <!-- 每一个驱动轮都需要配置传动装置 --> <xacro:joint_trans joint_name="wheel_lf_2_base" /> <xacro:joint_trans joint_name="wheel_rf_2_base" /> <xacro:joint_trans joint_name="wheel_lb_2_base" /> <xacro:joint_trans joint_name="wheel_rb_2_base" /> <!-- 控制器 --> <gazebo> <plugin name="skid_steer_drive_controller" filename="libgazebo_ros_skid_steer_drive.so"> <updateRate>100.0</updateRate> <robotNamespace>/</robotNamespace> <leftFrontJoint>wheel_lf_2_base</leftFrontJoint> <rightFrontJoint>wheel_rf_2_base</rightFrontJoint> <leftRearJoint>wheel_lb_2_base</leftRearJoint> <rightRearJoint>wheel_rb_2_base</rightRearJoint> <wheelSeparation>0.584</wheelSeparation> <wheelDiameter>0.33</wheelDiameter> <robotBaseFrame>base_footprint</robotBaseFrame> <torque>50</torque> <commandTopic>cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <publish_wheel_tf>false</publish_wheel_tf> <broadcastTF>true</broadcastTF> </plugin> </gazebo></robot>
这是启动gazebo仿真的launch文件
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find logistics_trolley)/urdf/logistics_trolley.xacro" />
<!-- 2. 启动Gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find logistics_trolley)/worlds/box_house.world" />
</include><!-- 2. 在Gazebo中添加机器人模型 --> <node pkg="gazebo_ros" type="spawn_model" name="my_model" args="-urdf -model logistics_trolley -param robot_description" /></launch>
这是启动导航的launch文件
<launch>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find logistics_trolley)/config/navigation.rviz" /><!-- 加载地图服务 --> <include file="$(find logistics_trolley)/launch/read_map.launch" /> <!-- 加载amcl --> <include file="$(find logistics_trolley)/launch/m_amcl.launch" /> <!-- 加载imove_base --> <include file="$(find logistics_trolley)/launch/m_path.launch" /></launch>
然后启动用键盘控制,车轮在rviz中不转动
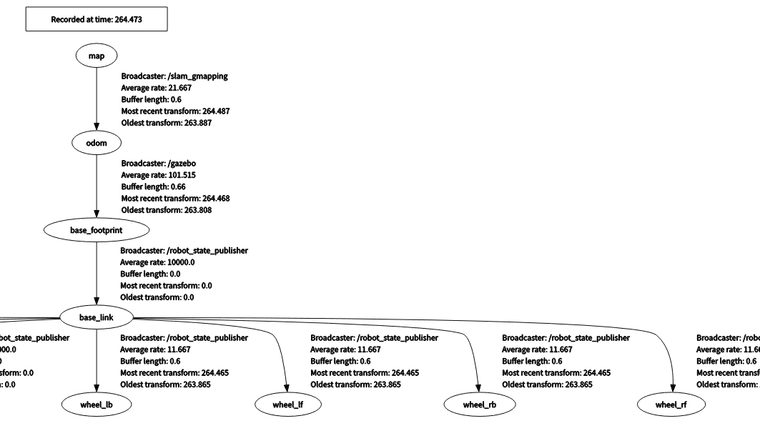
查看tf树