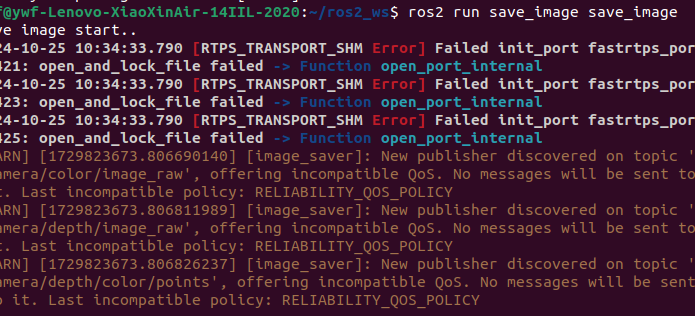
ros2 humble版本 订阅奥比中光相机发布的话题,新建文件夹并保存图片。话题已发布,没有保存到图片,并出现了以下错误和警告。
-
-
在使用 ROS 2 Humble 版本订阅奥比中光(Orbbec)相机发布的话题并尝试保存图片时,如果遇到错误和警告,这通常可能涉及几个方面的问题:数据接收、数据解析、文件写入权限或路径问题,以及 ROS 2 节点之间的通信问题。以下是一些可能的解决步骤和调试建议:
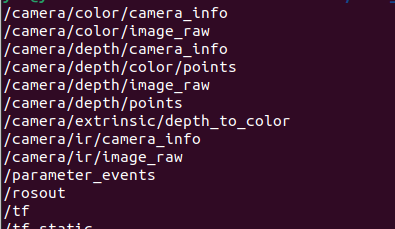
1. 确认话题发布
首先,确保奥比中光相机确实在发布图像话题。你可以使用
ros2 topic list命令查看当前所有活动的话题,并使用ros2 topic echo <topic_name> std_msgs/msg/String(或其他合适的消息类型)来检查话题内容。对于图像数据,通常使用的是sensor_msgs/msg/Image消息类型。2. 检查订阅节点
确保你的 ROS 2 节点正确订阅了图像话题,并且能够接收消息。以下是一个简单的 Python 示例,展示如何订阅图像话题并保存为图片文件:
import cv2 import numpy as np import rclpy from rclpy.node import Node from sensor_msgs.msg import Image from cv_bridge import CvBridge, CvBridgeError class ImageSaver(Node): def __init__(self): super().__init__('image_saver') self.subscription = self.create_subscription( Image, 'your_image_topic', # 替换为你的图像话题名称 self.listener_callback, 10) self.bridge = CvBridge() self.subscription # 防止被垃圾回收 def listener_callback(self, msg): try: cv_image = self.bridge.imgmsg_to_cv2(msg, "bgr8") except CvBridgeError as e: print(e) else: # 保存图片 cv2.imwrite('/path/to/save/image.png', cv_image) # 替换为实际的保存路径 def main(args=None): rclpy.init(args=args) image_saver = ImageSaver() rclpy.spin(image_saver) image_saver.destroy_node() rclpy.shutdown() if __name__ == '__main__': main()3. 检查错误和警告
- 权限问题:确保你的 ROS 2 节点有权限写入指定的文件夹。你可能需要以管理员身份运行你的 ROS 2 节点,或者更改文件夹的权限。
- 路径问题:确保提供的保存路径是存在的,且 ROS 2 节点有权限访问。
- 数据类型不匹配:确保你使用
CvBridge转换的消息类型与相机发布的消息类型相匹配。 - 依赖问题:确保所有必要的 ROS 2 包和 Python 库(如
cv_bridge和opencv-python)都已正确安装。
4. 查看日志
使用
ros2 node info <node_name>和ros2 log list命令查看节点的状态和日志。这可以帮助你识别节点是否在运行中遇到问题,以及具体是哪种类型的问题。5. 调试
如果上述步骤仍未解决问题,可以在你的回调函数中添加更多的打印语句来跟踪数据流和变量的状态,这有助于确定问题发生的具体位置。
通过上述步骤,你应该能够诊断并解决在 ROS 2 Humble 版本中订阅奥比中光相机话题并保存图片时遇到的问题。如果问题依旧存在,可能需要更详细地检查相机的驱动配置或 ROS 2 的具体实现细节。
以上为生成回答,仅供参考~