第六章xacro变为urdf后在rviz2中没有机器人模型但是有tf坐标变换
-
使用xacro将fishbot.xacro.urdf转为urdf后重新编译工作空间,运行Launch后找不到机器人模型,但是tf坐标变换都在,不知道甚么原因。我是用github克隆的chapt7 -
在使用xacro将
fishbot.xacro.urdf转为URDF后,如果在Rviz2中看不到机器人模型但tf坐标变换存在,可能的原因和解决方案如下:可能的原因
-
URDF文件转换问题:
- 在将xacro文件转换为URDF文件时,可能存在语法错误或转换不完全的问题。
- 确保使用了正确的命令进行转换,例如
rosrun xacro xacro your_robot.urdf.xacro > your_robot.urdf(注意,这里的your_robot.urdf.xacro和your_robot.urdf需要替换为你的实际文件名)。
-
Launch文件配置问题:
- 检查Launch文件是否正确设置了
robot_description参数,该参数应指向转换后的URDF文件。 - 确保Launch文件中启动了
rviz节点,并且rviz节点能够正确加载robot_description参数。
- 检查Launch文件是否正确设置了
-
Rviz2显示设置问题:
- 在Rviz2中,需要手动添加机器人显示组件才能看到机器人模型。
- 检查是否已正确添加机器人显示组件,包括机器人模型、关节、坐标系等。
-
TF坐标变换问题:
- 尽管tf坐标变换存在,但如果URDF文件中的关节或连杆定义不正确,也可能导致机器人模型无法正确显示。
- 检查URDF文件中的关节和连杆定义,确保它们正确连接并定义了正确的变换关系。
解决方案
-
重新转换URDF文件:
- 确保使用正确的命令和语法重新转换xacro文件为URDF文件。
- 仔细检查转换后的URDF文件,确保没有语法错误或遗漏的部分。
-
检查并修改Launch文件:
- 确保Launch文件中正确设置了
robot_description参数,并指向了正确的URDF文件路径。 - 确保Launch文件中包含了启动
rviz节点的命令,并且rviz节点能够正确加载robot_description参数。
- 确保Launch文件中正确设置了
-
在Rviz2中正确添加显示组件:
- 启动Rviz2后,手动添加机器人显示组件,包括机器人模型、关节、坐标系等。
- 确保已正确配置所有必要的显示组件,以便能够正确显示机器人模型。
-
检查URDF文件中的关节和连杆定义:
- 仔细检查URDF文件中的关节和连杆定义,确保它们正确连接并定义了正确的变换关系。
- 如果发现问题,请修改URDF文件并重新编译工作空间。
-
确保所有依赖项都已正确安装:
- 检查是否已正确安装了所有必要的ROS包和依赖项。
- 如果缺少某些包或依赖项,请安装它们并重新编译工作空间。
-
查看日志和错误信息:
- 检查ROS日志和错误信息,以获取有关机器人模型无法显示的更多详细信息。
- 根据日志和错误信息中的提示进行故障排除和修复。
综上所述,如果在Rviz2中看不到机器人模型但tf坐标变换存在,可能是由于URDF文件转换问题、Launch文件配置问题、Rviz2显示设置问题或TF坐标变换问题导致的。通过仔细检查并修改这些问题,应该能够解决机器人模型无法显示的问题。
以上为生成回答,仅供参考~
-
-
@小伊 我也碰到了这个问题!可以在scode里面安装urdf/xacro preview插件,先用插件看看能不能正常显示,不能显示一般是输入问题,仔细检查
(回复时不会截图) -
您遇到的问题是在使用scode(可能是指Visual Studio Code)时,尝试安装和使用URDF/XACRO Preview插件来查看URDF或XACRO文件,但发现无法正常显示。以下是一些可能的解决步骤和建议,帮助您排查和解决问题:
-
确认插件安装正确:
- 确保您已经从Visual Studio Code的扩展市场中正确安装了URDF/XACRO Preview插件。
- 重启Visual Studio Code以确保插件正确加载。
-
检查URDF/XACRO文件:
- 仔细检查您的URDF或XACRO文件,确保XML格式正确无误,包括所有必要的标签、属性和闭合标签。
- 确保文件路径和文件名没有错误,特别是在引用其他文件或模型时。
-
查看插件配置:
- 检查插件的配置设置,确保所有必要的路径和设置都已正确配置。
- 如果插件需要额外的依赖项(如Python库),请确保这些依赖项已正确安装。
-
检查输入问题:
- 如您所提到的,输入问题可能是导致无法正常显示的原因之一。确保在Visual Studio Code中打开的是正确的URDF或XACRO文件。
- 如果使用了命令行参数或特定设置来启动预览,请确保这些参数和设置是正确的。
-
查看插件文档和社区:
- 查阅插件的官方文档,了解是否有任何特定的安装或配置步骤。
- 访问插件的GitHub页面或相关社区,查看是否有其他用户遇到类似问题,并查找可能的解决方案。
-
尝试其他预览工具:
- 如果URDF/XACRO Preview插件仍然无法正常工作,您可以考虑使用其他工具来预览URDF或XACRO文件,如RViz(Robot Visualization Tool)或Web-based URDF viewer。
-
联系插件开发者:
- 如果问题仍然无法解决,您可以考虑联系插件的开发者,提供详细的错误信息和日志文件,以便他们能够更好地帮助您解决问题。
希望这些步骤和建议能帮助您解决在scode中使用URDF/XACRO Preview插件时遇到的问题。如果还有其他问题或需要进一步的帮助,请随时提问。
以上为生成回答,仅供参考~
-
-
此回复已被删除! -
-
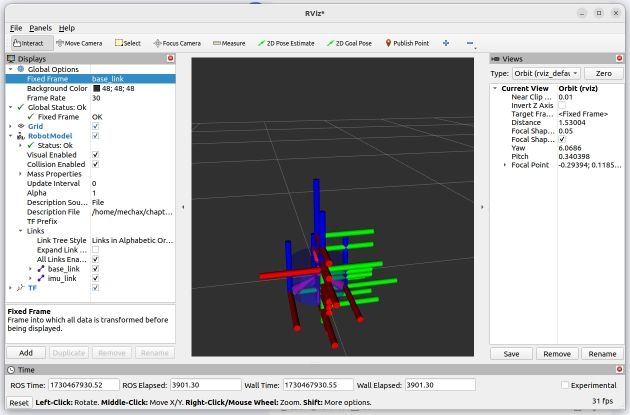
@小鱼 我也遇到相同問題,使用GITHUB下載的配套資料,進行6.2.4章時,無法按圖6-10 6-11 或612 正確顯示機器人模型(傳感器/車輪/相機沒有)但TF的坐標卻存在
-
-
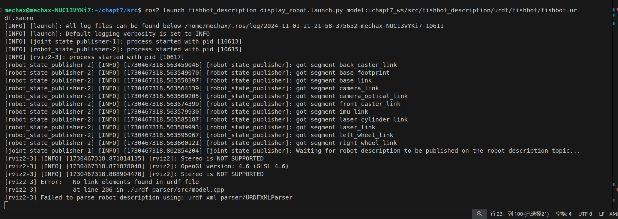
@小鱼 1732459514.3582094 [INFO] [launch]: All log files can be found below /home/javen/.ros/log/2024-11-24-22-45-14-357632-javen-Precision-3540-14985
1732459514.3582995 [INFO] [launch]: Default logging verbosity is set to INFO
1732459514.4918013 [INFO] [joint_state_publisher-1]: process started with pid [14987]
1732459514.4919271 [INFO] [robot_state_publisher-2]: process started with pid [14989]
1732459514.4919915 [INFO] [rviz2-3]: process started with pid [14991]
1732459514.5100920 [robot_state_publisher-2] [INFO] [1732459514.509762403] [robot_state_publisher]: got segment back_caster_link
1732459514.5102563 [robot_state_publisher-2] [INFO] [1732459514.509825932] [robot_state_publisher]: got segment base_footprint
1732459514.5103359 [robot_state_publisher-2] [INFO] [1732459514.509831893] [robot_state_publisher]: got segment base_link
1732459514.5104046 [robot_state_publisher-2] [INFO] [1732459514.509835750] [robot_state_publisher]: got segment camera_link
1732459514.5104702 [robot_state_publisher-2] [INFO] [1732459514.509839147] [robot_state_publisher]: got segment camera_optical_link
1732459514.5105395 [robot_state_publisher-2] [INFO] [1732459514.509842343] [robot_state_publisher]: got segment front_caster_link
1732459514.5106080 [robot_state_publisher-2] [INFO] [1732459514.509845469] [robot_state_publisher]: got segment imu_link
1732459514.5106728 [robot_state_publisher-2] [INFO] [1732459514.509848695] [robot_state_publisher]: got segment laser_cylinder_link
1732459514.5107341 [robot_state_publisher-2] [INFO] [1732459514.509851961] [robot_state_publisher]: got segment laser_link
1732459514.5107942 [robot_state_publisher-2] [INFO] [1732459514.509855307] [robot_state_publisher]: got segment left_wheel_link
1732459514.5108559 [robot_state_publisher-2] [INFO] [1732459514.509858713] [robot_state_publisher]: got segment right_wheel_link
1732459514.6994801 [joint_state_publisher-1] [INFO] [1732459514.699268962] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
1732459514.8098910 [rviz2-3] [INFO] [1732459514.809638251] [rviz2]: Stereo is NOT SUPPORTED
1732459514.8101821 [rviz2-3] [INFO] [1732459514.809710566] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
1732459514.8227289 [rviz2-3] [INFO] [1732459514.822449059] [rviz2]: Stereo is NOT SUPPORTED -
@539285719 所以可以显示什么
-
此回复已被删除!