学习第一个 MicroROS 节点时接收 ESP32 数据报 [ros2run]: Segmentation fault 错
-
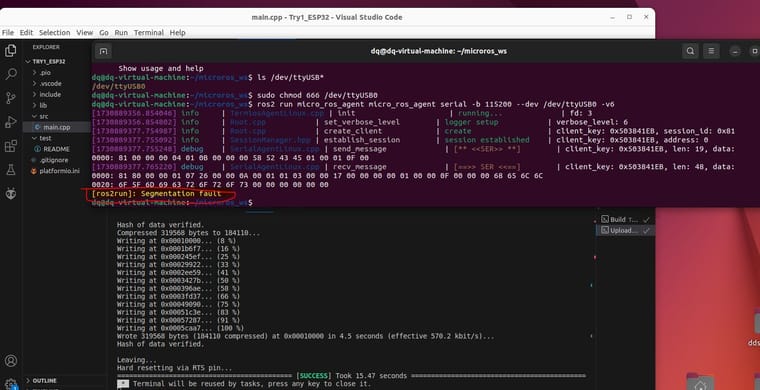
循序渐进学到 MicroROS 第一个节点时,遇到如下问题:
之前几经挫折才完成 Microros agent 的安装,不知道这个问题是由于那个环节所致。
请知者指点,多谢!
-
遇到
Segmentation fault错误通常表明程序在运行时试图访问它没有权限访问的内存区域,或者访问了已经被释放的内存。在尝试运行 MicroROS 节点时遇到这个问题,可能有几个原因:-
内存不足:
- ESP32 是一个资源有限的设备,尤其是其内存(RAM)。如果你的 MicroROS 节点或相关组件占用了过多的内存,可能会导致内存溢出,从而引发分段错误。
- 检查你的代码,确保没有不必要的内存分配,尤其是大型数据结构或数组。
-
错误的指针操作:
- 如果你的代码中有指针操作,确保所有指针在使用前都已正确初始化,并且指向有效的内存地址。
- 避免野指针(未初始化的指针)和悬挂指针(指向已释放内存的指针)。
-
MicroROS 组件或依赖问题:
- 确保你安装的 MicroROS 组件与你的 ESP32 固件版本兼容。
- 检查是否有任何已知的 bug 或问题与你使用的 MicroROS 版本相关。
-
编译和链接问题:
- 确保你的项目正确配置,所有必要的库都已正确链接。
- 尝试清理并重新构建你的项目,有时候旧的编译文件可能会导致问题。
-
代码错误:
- 仔细检查你的代码,尤其是与 MicroROS 节点初始化相关的部分。
- 查看是否有任何明显的逻辑错误或资源访问冲突。
-
调试和日志:
- 使用 ESP32 的调试工具(如 JTAG 调试器)来获取更详细的错误信息。
- 增加日志输出,尤其是在进行内存分配和指针操作前后,这可以帮助你定位问题发生的具体位置。
-
硬件问题:
- 虽然不太常见,但硬件故障(如损坏的 ESP32 板)也可能导致分段错误。
解决步骤
-
检查内存使用情况:
- 使用
free()函数或类似工具监控内存使用情况。
- 使用
-
代码审查:
- 仔细检查代码,特别是与指针和内存操作相关的部分。
-
更新和兼容性检查:
- 确保所有软件组件都是最新的,并且相互兼容。
-
简化问题:
- 尝试创建一个最简单的 MicroROS 节点,看看是否仍然出现分段错误。这有助于确定问题是否与特定的代码或配置有关。
-
社区和支持:
- 访问 MicroROS 的官方论坛或社区,看看是否有其他人遇到并解决了类似的问题。
通过系统地检查这些方面,你应该能够更接近问题的根源,并找到解决
Segmentation fault错误的方法。
以上为生成回答,仅供参考~
-
-
补充:
ROS2安装在 Ubuntu22.04 虚拟机中。
micro ros agent 是参考社区帖子:
agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法
下载到本地安装的,安装在根目录下。 -
历经周折,总算搞定!
其实也不能算是搞定了,只是回避了。我原来是基于WIN10下的Vmware 安装的 Ubuntu虚拟机,安装软件的过程虽不顺利,但也完成了,就在和硬件通讯的过程中卡住了,而且所提示的问题是我很难应对的:程序段出错!
原担心是由于硬件所致,虽然心里不太认同这个推测,但Linux下的程序问题我实在无能。故买了鱼香的控制板,期望用完全一致的环境尝试。
在拿到板子、仔细阅读所提供的资料时发现,鱼香特别提示:基于虚拟机会出现一些问题!
这使我预感到不妙,果真,连上鱼香的控制板后,状况一样!
只好重新找了一台机器,安装ubuntu及相应软件,所有过程和虚拟机上一样。
接上硬件后一切正常,不但鱼香的控制板OK,我自己以前的一块M5Stack板子,以及基于 RT-Thread 的 MicroROS 库烧写的 STM32F411CE板都通讯正常了。
实在无语,如果早有人明说:不要在虚拟机上尝试,会踩坑。那我就不会在这上面耗费了近10天时间。
导致我对 ROS2 都快没有信心了,考虑是否值得在这上面花费精力。
不管怎样,总算结局过得去,在此回复,更多的是提醒后来人,不要尝试在虚拟机上玩 ROS 吧,除非你是 Linux 高手!
下面继续我在 MicroROS 上的尝试。但愿不要再遇到此类毫无价值的折腾。