ros2 service list 看不到内容
-
ros2 service list 看不到内容
-
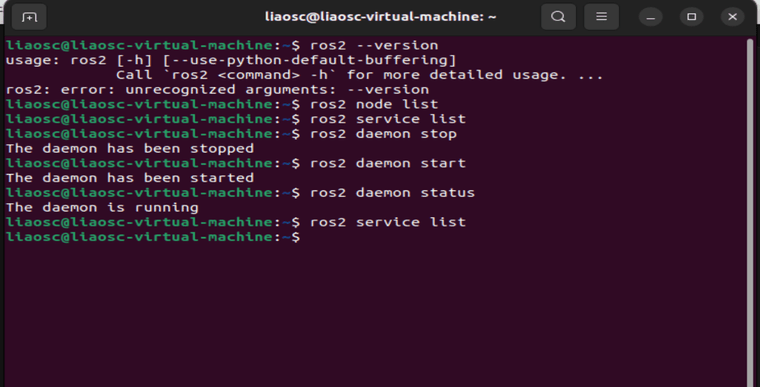
在使用 ROS 2(Robot Operating System 2)时,如果你执行
ros2 service list命令却看不到任何内容,可能有以下几种原因:-
没有运行的服务:
- 最直接的原因是当前 ROS 2 网络中没有任何服务在运行。确保你启动了包含服务定义和服务的节点。
-
节点未正确启动:
- 检查你的节点是否已经正确启动。你可以使用
ros2 node list来查看当前运行的所有节点。
- 检查你的节点是否已经正确启动。你可以使用
-
命名空间(Namespace)问题:
- 如果你的节点使用了命名空间,确保你在查询服务时也指定了正确的命名空间。例如,如果节点在
/my_namespace下运行,服务可能也在该命名空间下。
- 如果你的节点使用了命名空间,确保你在查询服务时也指定了正确的命名空间。例如,如果节点在
-
服务类型未注册:
- 确保你的服务类型已经在你的 ROS 2 环境中正确注册。服务类型通常是在节点的 C++、Python 或其他语言的代码中定义的。
-
网络问题:
- 确保你的 ROS 2 网络是连通的。ROS 2 使用 DDS(Data Distribution Service)或 RTI Connext DDS 等中间件进行通信,网络配置错误或中间件未正确安装/配置可能导致节点间无法通信。
-
权限问题:
- 在某些系统上,权限问题可能阻止 ROS 2 节点正确发布或发现服务。确保你有足够的权限来运行 ROS 2 节点和查询服务。
-
ROS 2 环境变量:
- 确保你的环境变量(如
ROS_DOMAIN_ID)正确设置,并且所有相关节点都在相同的域中运行。
- 确保你的环境变量(如
-
查看日志:
- 使用
ros2 node info <node_name>查看特定节点的信息,包括它提供的服务和订阅的主题。同时,检查 ROS 2 的日志输出,看看是否有关于服务发布或查询的错误信息。
- 使用
-
重启 ROS 2 会话:
- 有时候,重启你的 ROS 2 会话(即重新启动所有 ROS 2 相关的终端和进程)可以解决一些不明确的问题。
如果以上步骤都无法解决问题,你可能需要更详细地检查你的 ROS 2 配置或代码,或者寻求来自 ROS 2 社区的帮助。
以上为生成回答,仅供参考~
-