面向对象编程C++,最后一步报错
-
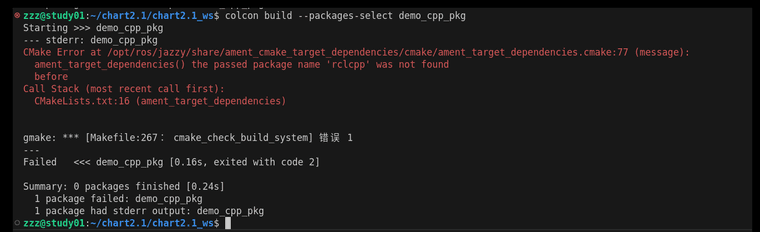
跟书上2.3节在功能包中编写C++节点一起做的,前面都还好,到最后一步出问题:
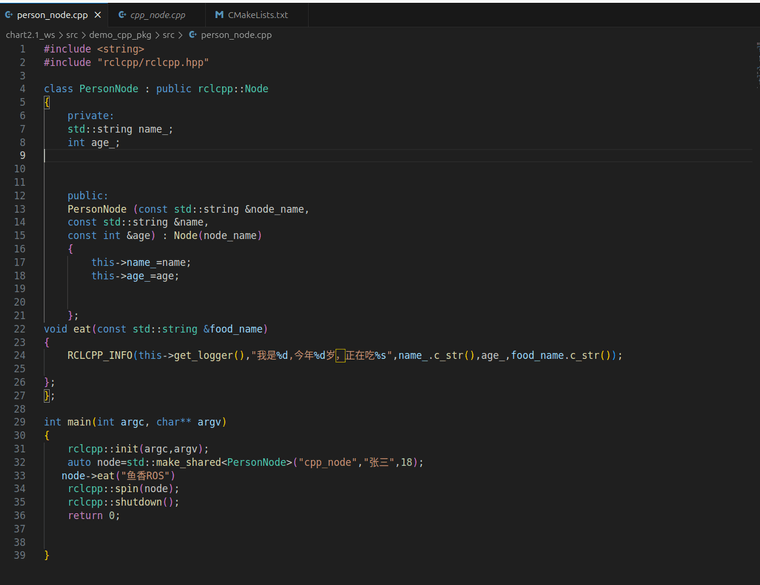
代码:
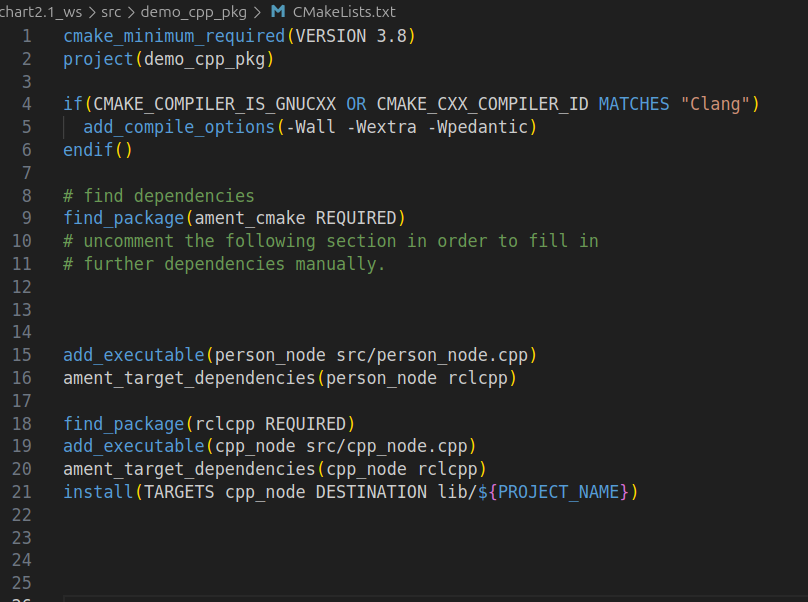
cmakelist:
该怎么解决? -
要解决您在C++中使用ROS(Robot Operating System)编写节点时遇到的编译错误,我们需要更多的具体信息来准确地定位问题。不过,我可以提供一些通用的步骤和建议,帮助您检查和解决常见的CMakeLists.txt配置问题,以及C++代码中的常见错误。
1. 检查CMakeLists.txt
首先,确保您的CMakeLists.txt文件正确配置。对于ROS节点,通常需要包含以下内容:
cmake_minimum_required(VERSION 3.0.2) project(your_project_name) find_package(REQUIRED roscpp std_msgs) # 根据需要添加其他包 add_executable(your_node_name src/your_node.cpp) target_link_libraries(your_node_name ${catkin_LIBRARIES}) catkin_package()- cmake_minimum_required: 指定CMake的最低版本。
- project: 项目的名称。
- find_package: 查找并包含必要的ROS包。
- add_executable: 编译源文件生成可执行文件。
- target_link_libraries: 链接必要的库。
- catkin_package: 标记这个项目是一个catkin包。
2. 检查C++代码
确保您的C++代码没有语法错误,并且已经正确包含了所有必要的头文件。例如,如果您使用了ROS的消息类型或服务,确保已经正确包含了这些类型的头文件,并且已经初始化了ROS节点。
#include "ros/ros.h" #include "std_msgs/String.h" int main(int argc, char **argv) { ros::init(argc, argv, "your_node_name"); ros::NodeHandle nh; ros::Publisher chatter_pub = nh.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0; }3. 编译和运行时错误
- 编译错误:通常是由于CMakeLists.txt配置错误或C++代码中的语法错误引起的。
- 运行时错误:可能是由于节点未能正确初始化,或者ROS环境变量(如
ROS_MASTER_URI和ROS_HOSTNAME)未正确设置。
4. 查看编译输出
当您运行
catkin_make或colcon build(对于ROS 2)时,仔细查看输出中的错误信息。错误信息通常会指出问题所在的文件和行号。5. 检查ROS环境
确保您的ROS环境已经正确设置。这包括源了ROS的setup.bash文件,并且当前工作目录是在您的catkin工作空间中。
source /opt/ros/<distro>/setup.bash cd ~/catkin_ws catkin_make source devel/setup.bash6. 搜索特定错误
如果错误信息指向一个特定的库或功能(如
undefined reference to),尝试在网上搜索该错误信息,看看是否有其他开发者遇到并解决了相同的问题。如果您能提供更具体的错误信息或CMakeLists.txt和C++代码的相关部分,我可以提供更精确的帮助。
以上为生成回答,仅供参考~
-
@1334576388 find_package(rclcpp 放到最上面)