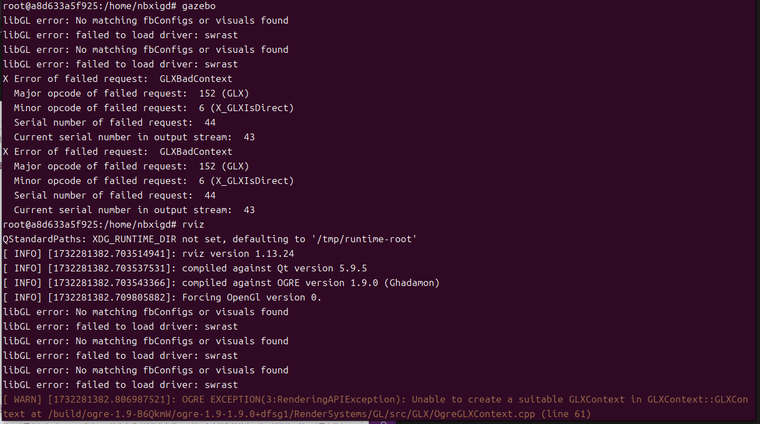
ubuntu24.04运行一键安装melodic版本ros后无法打开rviz和gazebo
-
看过论坛内有关n卡驱动的帖子但是NV settings中没有对应的选项不知道该怎么解决打不开rviz和gazebo的问题
-
针对Ubuntu 24.04运行一键安装Melodic版本ROS后无法打开rviz和Gazebo的问题,这里提供一些可能的解决方案。首先,需要明确的是,Ubuntu 24.04作为较新的LTS版本,其官方支持周期较长,理论上应该能够支持ROS Melodic等较旧的ROS发行版,尽管可能不是最优配置。
一、检查Nvidia驱动和CUDA配置
-
确认Nvidia驱动安装:
- 确保Ubuntu 24.04已经正确安装了与显卡型号相匹配的Nvidia驱动。可以通过
nvidia-smi命令检查驱动是否安装成功,并显示GPU信息。
- 确保Ubuntu 24.04已经正确安装了与显卡型号相匹配的Nvidia驱动。可以通过
-
安装CUDA(如果需要):
- 如果需要使用GPU加速,需要安装与Nvidia驱动版本相匹配的CUDA版本。可以从NVIDIA开发者网站下载并安装CUDA。
- 安装完成后,需要配置环境变量,将CUDA的路径添加到
PATH和LD_LIBRARY_PATH中。
二、检查ROS环境配置
-
检查ROS安装:
- 确保ROS Melodic已经正确安装,并且环境变量已经正确配置。可以通过
source /opt/ros/melodic/setup.bash命令激活ROS环境。
- 确保ROS Melodic已经正确安装,并且环境变量已经正确配置。可以通过
-
检查依赖库:
- 确保所有必要的依赖库都已经安装,特别是与图形和3D渲染相关的库。可以尝试更新系统并安装所有推荐的更新。
三、调试和排查问题
-
使用gdb调试:
- 如果rviz或Gazebo无法启动,并报错“segmentation fault (core dumped)”,可以使用gdb进行调试。通过
gdb rviz或gdb gazebo命令启动调试器,然后输入run命令运行程序,观察是否有有用的错误信息输出。
- 如果rviz或Gazebo无法启动,并报错“segmentation fault (core dumped)”,可以使用gdb进行调试。通过
-
检查日志文件:
- 查看ROS的日志文件,通常位于
~/.ros/log目录下,可能会有关于rviz或Gazebo无法启动的详细信息。
- 查看ROS的日志文件,通常位于
-
尝试重新安装rviz和Gazebo:
- 如果以上方法都无法解决问题,可以尝试重新安装rviz和Gazebo。可以通过ROS的包管理器(如apt)卸载并重新安装这些包。
四、其他注意事项
-
确保系统更新:
- 保持Ubuntu 24.04系统的更新,以确保所有安全补丁和性能改进都已经应用。
-
检查硬件兼容性:
- 确保你的硬件(特别是显卡)与ROS Melodic和Ubuntu 24.04兼容。有时候,较新的硬件可能不完全兼容较旧的软件版本。
-
寻求社区帮助:
- 如果以上方法都无法解决问题,可以考虑在ROS社区论坛或Ubuntu社区论坛发帖求助。提供尽可能详细的信息,包括你的系统配置、ROS版本、安装步骤以及遇到的错误信息。
综上所述,解决Ubuntu 24.04上ROS Melodic无法打开rviz和Gazebo的问题可能需要从多个方面入手。希望以上建议能够帮助你解决问题。
以上为生成回答,仅供参考~
-
-
@848040089 https://fishros.org.cn/forum/topic/447/docker安装ros后-gazebo和rviz打不开
该帖中有类似的问题但是解决使用的方法我没办法使用