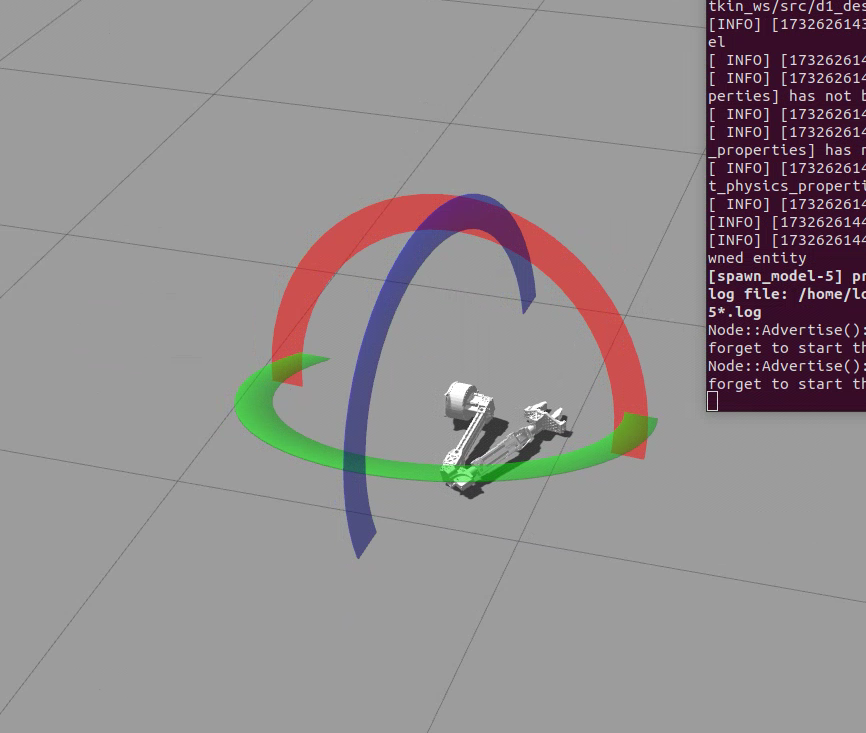
我使用的官方的.launch文件启动的。文件的内容如下。
<launch>
<include
file="$(find gazebo_ros)/launch/empty_world.launch" />
<node
name="tf_footprint_base"
pkg="tf"
type="static_transform_publisher"
args="0 0 0 0 0 0 base_link base_footprint 40" />
<node
name="spawn_model"
pkg="gazebo_ros"
type="spawn_model"
args="-file $(find d1_description)/urdf/d1_description.urdf -urdf -model d1_description"
output="screen" />
<node
name="fake_joint_calibration"
pkg="rostopic"
type="rostopic"
args="pub /calibrated std_msgs/Bool true" />
</launch>