SLAM建图
-
就是我用slam建图时候,一开始还好好的,走着走着地图就会突然变形或者出现少许偏差(过程中我也没出现撞墙等等)
请帮忙看看,该怎么解决,谢谢!!!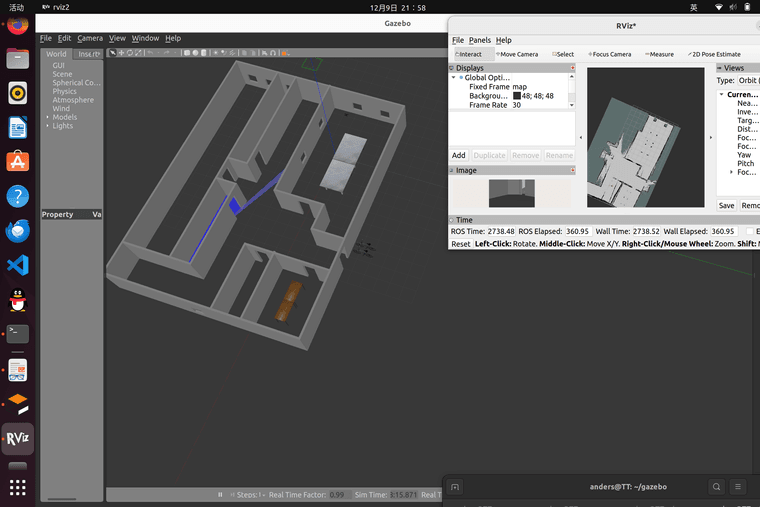
-
@2768136927 而且出现偏差后如果继续扫描就会按照偏差的图进行扩展

-
@2768136927 这是karto bug, 跟里程计有些关系,我抽空校准校准修复一下
-
@小鱼 好的,谢谢!
-
@2768136927 楼主能不能给一份world文件,非常需要