micro ros odom 使用best effort發送時 接收端無法獲得任何信息
-
我遇到了與以下連結一樣的問題https://github.com/micro-ROS/freertos_apps/issues/62
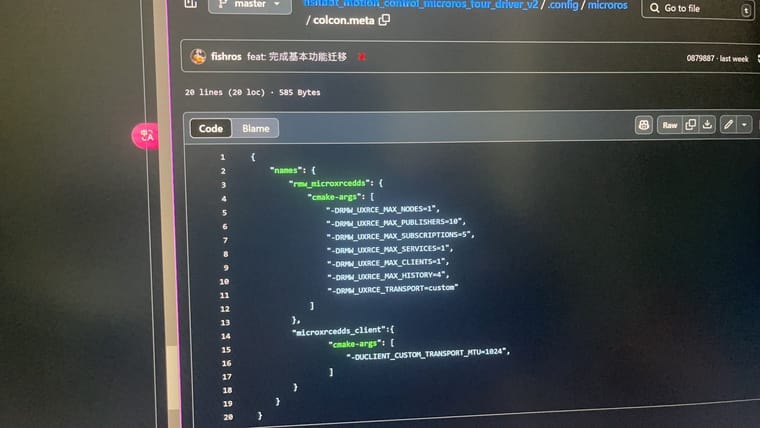
在查詢資料的過程中看到小魚的四驅控制程式中有這段解決方法
請問這檔案是能夠自己自行添加的嗎 -
关于micro-ROS中odom使用best effort发送时接收端无法获得任何信息的问题,以及提到的解决方案文件是否可以自行添加,以下是我的分析和建议:
问题分析
在micro-ROS中,使用best effort通信模式时,消息可能会因为网络拥塞或连接不稳定而丢失。这通常发生在资源受限的嵌入式系统中,如使用FreeRTOS等操作系统的设备。如果接收端无法获得发送的odom信息,可能的原因包括:
- 网络连接问题:发送端和接收端之间的网络连接可能不稳定或存在配置错误。
- 主题名称不匹配:发送端发布的主题名称与接收端订阅的主题名称不一致。
- 消息序列化/反序列化问题:消息在发送前和接收后需要进行序列化和反序列化,如果过程中存在错误,可能导致消息无法正确解析。
- MicroXRCEAgent配置问题:MicroXRCEAgent是micro-ROS与ROS 2系统之间的桥梁,如果其配置不正确,可能导致消息无法正确传递。
解决方案
针对上述问题,可以尝试以下解决方案:
- 检查网络连接:确保发送端和接收端之间的网络连接稳定,并检查网络配置是否正确。
- 核对主题名称:确保发送端发布的主题名称与接收端订阅的主题名称完全一致。
- 检查消息类型和序列化:确保发送和接收的消息类型匹配,并检查序列化/反序列化过程是否正确。
- 重新配置MicroXRCEAgent:检查MicroXRCEAgent的配置,确保其能够正确地将消息从micro-ROS传递到ROS 2系统,并从ROS 2系统传递到micro-ROS。
关于解决方案文件
您提到的“小鱼的四驅控制程式中的解决方案文件”,我无法直接获取该文件的具体内容,但通常这类解决方案文件可能包含以下一些内容:
- 配置信息:如MicroXRCEAgent的配置参数、网络设置等。
- 代码修改:针对特定问题的代码修改,如修复序列化/反序列化错误、调整主题名称等。
- 依赖库:可能需要添加或更新某些依赖库以支持特定的功能。
是否可以自行添加:
- 如果该文件是官方或社区提供的解决方案,并且与您的项目兼容,那么您可以尝试将其添加到您的项目中。
- 在添加之前,请仔细阅读该文件的说明和注意事项,确保您了解其内容和可能的影响。
- 如果该文件包含对特定硬件或软件的依赖,请确保您的项目环境满足这些依赖要求。
注意事项
- 在进行任何修改之前,请备份您的项目文件,以防出现不可预见的问题。
- 如果您不确定如何解决问题或添加文件,请考虑寻求官方支持或社区帮助。
希望以上信息对您有所帮助!如果问题仍然存在,请提供更多的上下文信息,以便进行更详细的诊断和解决。
以上为生成回答,仅供参考~
-
@Rem3000 可以自己加的,看构建的 release.sh
-
@小鱼 解決了 感謝你