ros2运行colcon build报错
-
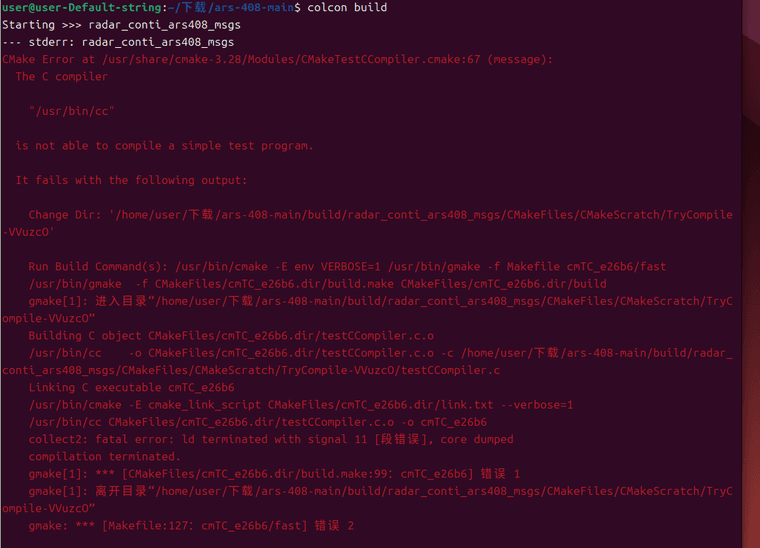
显示 gmake[1]: *** [CMakeFiles/cmTC_e26b6.dir/build.make:99:cmTC_e26b6] 错误 1
gmake[1]: 离开目录“/home/user/下载/ars-408-main/build/radar_conti_ars408_msgs/CMakeFiles/CMakeScratch/TryCompile-VVuzcO”
gmake: *** [Makefile:127:cmTC_e26b6/fast] 错误 2
超级感谢解答! -
当你遇到
colcon build过程中的错误,特别是涉及到 CMake 的错误,通常是由于多种原因导致的。以下是一些可能的解决步骤和检查点,帮助你定位和解决问题:-
检查依赖项:
确保你的系统上安装了所有必要的依赖项。ROS 2 和其依赖库(如 CMake, GCC, G++, Python 等)需要正确安装并配置。 -
清理构建目录:
有时候,旧的构建文件可能会导致构建失败。尝试删除构建目录(通常是build和install文件夹),然后重新运行colcon build。rm -rf build install colcon build -
检查 CMake 版本:
确保你的 CMake 版本与 ROS 2 版本兼容。ROS 2 通常需要较新版本的 CMake。你可以通过运行cmake --version来检查当前安装的版本。 -
查看详细输出:
使用colcon build --packages-select <package-name> --event-handlers console_direct+来获取更详细的构建输出。这可以帮助你更精确地定位问题。 -
检查代码和配置文件:
- 确保你的 CMakeLists.txt 文件没有语法错误。
- 检查是否有任何包特定的依赖项或配置问题。
-
环境变量:
确保你的环境变量设置正确,特别是与 ROS 2 和 CMake 相关的路径。 -
权限问题:
确保你有足够的权限来访问和修改构建目录。如果你是在一个受限的用户账户下工作,可能需要检查权限设置。 -
使用 Docker 或其他容器技术:
如果问题仍然无法解决,你可以尝试在 Docker 容器中构建你的 ROS 2 环境。这可以排除许多与系统配置相关的问题。 -
查看日志和错误报告:
仔细查看构建过程中生成的日志文件(通常位于build/log目录下),这些日志可能包含有用的错误信息。 -
搜索社区和论坛:
如果上述步骤都没有解决问题,你可以搜索 ROS 2 的 GitHub 问题跟踪器、Stack Overflow 或其他相关论坛,看看是否有其他人遇到过类似的问题。
根据你提供的错误信息,问题似乎发生在 CMake 的配置或编译阶段。按照上述步骤进行检查和调整,应该能帮助你更接近问题的根源。如果问题依然存在,可能需要更具体的错误信息来进一步分析。
以上为生成回答,仅供参考~
-